Barkhausen Stability Criterion 30106y
This document was ed by and they confirmed that they have the permission to share it. If you are author or own the copyright of this book, please report to us by using this report form. Report 2z6p3t
Overview 5o1f4z
& View Barkhausen Stability Criterion as PDF for free.
More details 6z3438
- Words: 589
- Pages: 3
Barkhausen stability criterion
1
Barkhausen stability criterion The Barkhausen stability criterion is a mathematical condition to determine when a linear electronic circuit will oscillate. It was put forth in 1921 by German physicist Heinrich Georg Barkhausen (1881-1956). It is widely used in the design of electronic oscillators, and also in the design of general negative circuits such as op amps, to prevent them from oscillating.
Limitations Barkhausen's criterion applies to linear circuits with a loop. Therefore it cannot be applied to one port negative resistance active elements like tunnel diode oscillators.
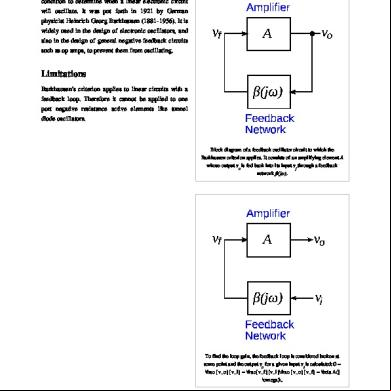
Block diagram of a oscillator circuit to which the Barkhausen criterion applies. It consists of an amplifying element A whose output vo is fed back into its input vf through a network ß(jω).
To find the loop gain, the loop is considered broken at some point and the output vo for a given input vi is calculated:G = \frac {v_o}{v_i} = \frac{v_f}{v_i}\frac {v_o}{v_f} = \beta A(j \omega)\,
Barkhausen stability criterion
2
Criterion It states that if path, so
is the gain of the amplifying element in the circuit and
is the transfer function of the
is the loop gain around the loop of the circuit, the circuit will sustain steady-state
oscillations only at frequencies for which: 1. The loop gain is equal to unity in absolute magnitude, that is, 2. There must be a positive i.e., the phase shift around the loop is zero or an integer multiple of 2π: Barkhausen's criterion is a necessary condition for oscillation, not sufficient. This means there are some circuits which satisfy the criterion but do not oscillate. Unfortunately these can not be distinguished with the Nyquist stability criterion. The Nyquist stability criterion in its general form only indicates instability but cannot provide any information if this instability will cause oscillations or not. Thus, there seems to be still no compact formulation of an oscillation criterion that is both necessary as well as sufficient, ref. [1].
Erroneous version Barkhausen's original "formula for self-excitation", intended for determining the oscillation frequencies of the loop, involved an equality sign: |βA| = 1. At the time conditionally-stable nonlinear systems were poorly understood; it was widely believed that this gave the boundary between stability (|βA| < 1) and instability (|βA| ≥ 1), and this erroneous version found its way into the literature.[1] However, stable oscillations only occur at frequencies for which equality holds.
See also • Nyquist stability criterion
Notes [1] Lundberg, Kent (2002-11-14). "Barkhausen Stability Criterion" (http:/ / web. mit. edu/ klund/ www/ weblatex/ node4. html). Kent Lundberg faculty website (http:/ / web. mit. edu/ klund/ www/ ). MIT. . Retrieved 2008-11-16.
References [1] Lutz von Wangenheim, "On the Barkhausen and Nyquist stability criteria", Anategrated Circuits and Signal Processing, DOI 10.1007/s10470-010-9506-4 Received: 17 June 2010 / Revised: 2 July 2010 / Accepted: 5 July 2010 Springer Science+Business Media, LLC 2010 ISSN: 1573-1979 (electronic version) [2] Lindberg, Erik, "The Barkhausen Criterion (Observation ?)", part of: Proceedings of NDES 2010, pages: 15-18, IEEE Workshop on Nonlinear Dynamics of Electronic Systems (NDES2010), 26 – 28 May 2010, Dresden, , http://www.ndes2010.org/
Article Sources and Contributors
Article Sources and Contributors Barkhausen stability criterion Source: http://en.wikipedia.org/w/index.php?oldid=401402590 Contributors: Alxeedo, Chetvorno, Cuaxdon, Honey88foru, Ideal gas equation, Littlealien182, Michael Hardy, Oli Filth, SGGH, 20 anonymous edits
Image Sources, Licenses and Contributors Image:Oscillator diagram1.svg Source: http://en.wikipedia.org/w/index.php?title=File:Oscillator_diagram1.svg License: Public Domain Contributors: :Chetvorno Image:Oscillator diagram2.svg Source: http://en.wikipedia.org/w/index.php?title=File:Oscillator_diagram2.svg License: Public Domain Contributors: :Chetvorno
License Creative Commons Attribution-Share Alike 3.0 Unported http:/ / creativecommons. org/ licenses/ by-sa/ 3. 0/
3
1
Barkhausen stability criterion The Barkhausen stability criterion is a mathematical condition to determine when a linear electronic circuit will oscillate. It was put forth in 1921 by German physicist Heinrich Georg Barkhausen (1881-1956). It is widely used in the design of electronic oscillators, and also in the design of general negative circuits such as op amps, to prevent them from oscillating.
Limitations Barkhausen's criterion applies to linear circuits with a loop. Therefore it cannot be applied to one port negative resistance active elements like tunnel diode oscillators.
Block diagram of a oscillator circuit to which the Barkhausen criterion applies. It consists of an amplifying element A whose output vo is fed back into its input vf through a network ß(jω).
To find the loop gain, the loop is considered broken at some point and the output vo for a given input vi is calculated:G = \frac {v_o}{v_i} = \frac{v_f}{v_i}\frac {v_o}{v_f} = \beta A(j \omega)\,
Barkhausen stability criterion
2
Criterion It states that if path, so
is the gain of the amplifying element in the circuit and
is the transfer function of the
is the loop gain around the loop of the circuit, the circuit will sustain steady-state
oscillations only at frequencies for which: 1. The loop gain is equal to unity in absolute magnitude, that is, 2. There must be a positive i.e., the phase shift around the loop is zero or an integer multiple of 2π: Barkhausen's criterion is a necessary condition for oscillation, not sufficient. This means there are some circuits which satisfy the criterion but do not oscillate. Unfortunately these can not be distinguished with the Nyquist stability criterion. The Nyquist stability criterion in its general form only indicates instability but cannot provide any information if this instability will cause oscillations or not. Thus, there seems to be still no compact formulation of an oscillation criterion that is both necessary as well as sufficient, ref. [1].
Erroneous version Barkhausen's original "formula for self-excitation", intended for determining the oscillation frequencies of the loop, involved an equality sign: |βA| = 1. At the time conditionally-stable nonlinear systems were poorly understood; it was widely believed that this gave the boundary between stability (|βA| < 1) and instability (|βA| ≥ 1), and this erroneous version found its way into the literature.[1] However, stable oscillations only occur at frequencies for which equality holds.
See also • Nyquist stability criterion
Notes [1] Lundberg, Kent (2002-11-14). "Barkhausen Stability Criterion" (http:/ / web. mit. edu/ klund/ www/ weblatex/ node4. html). Kent Lundberg faculty website (http:/ / web. mit. edu/ klund/ www/ ). MIT. . Retrieved 2008-11-16.
References [1] Lutz von Wangenheim, "On the Barkhausen and Nyquist stability criteria", Anategrated Circuits and Signal Processing, DOI 10.1007/s10470-010-9506-4 Received: 17 June 2010 / Revised: 2 July 2010 / Accepted: 5 July 2010 Springer Science+Business Media, LLC 2010 ISSN: 1573-1979 (electronic version) [2] Lindberg, Erik, "The Barkhausen Criterion (Observation ?)", part of: Proceedings of NDES 2010, pages: 15-18, IEEE Workshop on Nonlinear Dynamics of Electronic Systems (NDES2010), 26 – 28 May 2010, Dresden, , http://www.ndes2010.org/
Article Sources and Contributors
Article Sources and Contributors Barkhausen stability criterion Source: http://en.wikipedia.org/w/index.php?oldid=401402590 Contributors: Alxeedo, Chetvorno, Cuaxdon, Honey88foru, Ideal gas equation, Littlealien182, Michael Hardy, Oli Filth, SGGH, 20 anonymous edits
Image Sources, Licenses and Contributors Image:Oscillator diagram1.svg Source: http://en.wikipedia.org/w/index.php?title=File:Oscillator_diagram1.svg License: Public Domain Contributors: :Chetvorno Image:Oscillator diagram2.svg Source: http://en.wikipedia.org/w/index.php?title=File:Oscillator_diagram2.svg License: Public Domain Contributors: :Chetvorno
License Creative Commons Attribution-Share Alike 3.0 Unported http:/ / creativecommons. org/ licenses/ by-sa/ 3. 0/
3
Related Documents c2h70
Barkhausen Stability Criterion 30106y
October 2019 51
Routh-hurwitz Stability Criterion 5c464p
August 2021 0
Criterio Barkhausen 1s345j
November 2019 59
Kutzbach Criterion 4w6t3p
December 2019 34
Menu Criterion 2i2k43
June 2021 0