Diseño De Vigas Curvas. 6a6n6i
This document was ed by and they confirmed that they have the permission to share it. If you are author or own the copyright of this book, please report to us by using this report form. Report 2z6p3t
Overview 5o1f4z
& View Diseño De Vigas Curvas. as PDF for free.
More details 6z3438
- Words: 7,158
- Pages: 16
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Capítulo 9
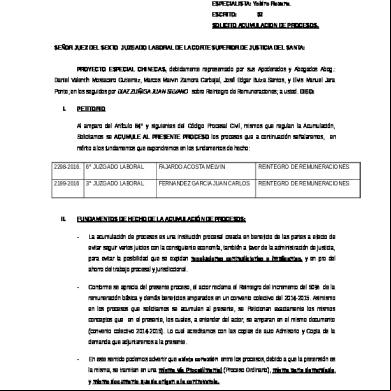
VIGAS CURVAS 1 INTRODUCCIÓN La fórmula de la flexión simple, σ = M / W, da resultados correctos para las vigas rectas cargadas simétricamente en flexión pura. También se la utiliza para vigas rectas cargadas por corte cuando las cargas pasan por el centro de corte y en tal caso el error es despreciable si el largo de la viga es mucho mayor que el alto de la misma. En el caso de vigas curvas donde el radio de curvatura es mayor que cinco veces la altura de la viga, la fórmula de flexión simple da resultados aceptables, pero los errores son importantes cuando el radio de curvatura es comparable con la altura de la viga. Por ello es necesario encontrar una solución que, aun siendo aproximada, de resultados satisfactorios para el caso de grandes curvaturas. La teoría de vigas curvas que se presenta en este capítulo se basa fundamentalmente en dos hipótesis simplificativas: 1) Las secciones planas perpendiculares a la línea baricéntrica permanecen planas después de la deformación. 2) Tanto la tensión radial σr como la tensión de corte τ son suficientemente pequeñas para poder considerar al problema como unidimensional (ver Figura 1-b). La fórmula para las tensiones normales circunferenciales σ θ que resulta de estas dos hipótesis se denomina “fórmula para vigas curvas en flexión”. En la próxima sección se demuestra que debido a la curvatura de la viga las secciones planas no giran alrededor del eje baricéntrico y además la ley para las tensiones normales σ θ no sigue una ley lineal sino hiperbólica.
Figura 1: Equilibrio de un elemento de viga curva
2 TENSIONES NORMALES CIRCUNFERENCIALES σθ En la Figura 2-a se considera un elemento infinitesimal de viga definido por los puntos 1, 2, 3 y 4. Las cargas exteriores producen en la sección considerada esfuerzos flexionales, cortantes y normales que deben equilibrarse por tensiones normales σθ y de corte τ. Hay que tener presente que se consideran secciones simétricas y cargas actuando en el plano de simetría, por lo tanto no hay torsión. Las tensiones de corte producen alabeo de la sección plana y modifican levemente la tensión σθ. Es usual despreciar el efecto del corte τ salvo en el caso de vigas con alma muy delgada.
153
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Figura 2: Elemento infinitesimal de viga curva
Las tensiones transversales σz (ver Figura 2-b ) son despreciables por lo que estamos en presencia de un caso de tensión plana.
2.1 Fórmula de la flexión compuesta para vigas curvas Considerando equilibrio de fuerzas en dirección circunferencial ( eje x en la Figura 2-a ) se tiene:
∫
A
∫
A
0 σ θ dA − N =
(1)
0 σ θ ( R − r ) dA − M z =
(2)
Estas integrales no pueden ser evaluadas si no se conoce la relación entre σθ y el radio r. Esa relación se obtiene de la hipótesis cinemática de que las secciones planas rotan alrededor del eje neutro y permanecen planas. Hay que tener presente que a esta altura de la formulación la posición del eje neutro es desconocida. El alargamiento eθ es función lineal de la distancia a la fibra neutra ( R n – r ) pero debido a que el largo inicial varía con el radio r se obtiene una variación no lineal para las deformaciones específicas εθ.
= εθ
eθ = r dθ
∆ ( dθ ) dθ Por la ley de Hooke se tiene:
donde:
(R
n
− r ) ∆ ( dθ ) R n = − 1 ω r dθ r
ω=
= σ θ ε= θ E
(3) (4)
Rn − r r
= ωE
Eω R n r
− Eω
(5)
Notar que en (5) se ha despreciado el efecto de la tensión radial σr. Según se observa en la Figura 1-b debería ser: 1 = εθ (6) (σ θ − ν σ r ) E luego
= σ θ εθ E + ν σ r
(7)
El término ( ν σr ) puede despreciarse porque σr en mucho menor que σθ y además el máximo de σr no coincide con los máximos de σθ .
154
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Sustituyendo (5) en (1) y (2) y reordenando se tiene:
= N R n E ω Am − Eω A
(8)
= M z R n Eω ( R Am − A )
(9)
donde A es el área de la sección y Am es el “área modificada” dA (10) r Notar que los elementos de área más alejados del centro de curvatura (r grande ) contribuyen menos al área modificada, además Am resulta levemente superior a ( A/R ): Am =
Am ≈ A / R
∫
A
Am > A / R
y también:
(11)
La ecuación (9) puede reescribirse como:
Mz R Am − A Sustituyendo (12) en (8) y despejando Eω se tiene Am M z N = − Eω A A ( R Am − A ) R n Eω =
(12)
(13)
Finalmente sustituyendo (12) y (13) en (5) se tiene
Am 1 Mz N σθ = + − A R Am − A r A
(14)
que es la fórmula de la flexión compuesta para vigas curvas. Nota: N positivo indica tracción y M z positivo implica tracción en las fibras del radio interior ( puntos más próximos al centro de curvatura ). La tensión circunferencial σθ dada por (14) tiene una variación hiperbólica debida al término (1/r ) como se puede apreciar en la Figura 3. Cuando la viga es “poco curva” los valores de “r ” son grandes respecto a la altura de la viga y entonces la variación se hace casi lineal concordando con los valores provistos por la fórmula de flexión simple para viga recta (15). Notar que en la derivación de la ecuación (14) se plantearon ecuaciones de equilibrio (1) y (2), cinemáticas (3) y constitutivas (5). Hay que tener presente que la “fórmula” (14) para vigas curvas en flexión es todavía aproximada debido a las numerosas hipótesis simplificativas usadas en su derivación. Los valores hallados con la fórmula de vigas curvas (14) pueden compararse con los resultados exactos provistos por la teoría de la elasticidad como también por la fórmula menos exacta (15) que se usa para vigas rectas. En la Tabla 1 se presentan los cocientes entre las tensiones máximas provistas por las diferentes teorías para el caso de una sección rectangular sometida a flexión pura para varias relaciones entre el radio R y la altura de la viga h (R y h están indicados en las Figuras 2 y 3). Tabla 1: Comparación entre los resultados provistos por distintas teorías
σ θ viga curva
σ θ viga recta
R h
σ θ teoría elasticidad
σ θ teoría elasticidad
error %
0,75
1,012
0,526
47 %
1
0,997
0,654
35 %
2
0,997
0,831
17 %
5
0,999
0,933
7%
Como en los casos prácticos generalmente R / h > 1, los resultados de la fórmula para vigas curvas pueden considerarse exactos. La teoría de viga recta da un error del 7 % cundo R / h = 5 y el error crece hasta el 35 % cundo R/ h = 1.
155
Compendio de Cálculo Estructural II – FCEFyN – UNC
σθ máx fórmula viga recta
Mz o R
J.Massa-J.Giro-A.Giudici - 2015
σθ máx fórmula viga curva
r eje neutro
h
eje baricéntrico excentricidad Figura 3: Variación hiperbólica de las tensiones circunferenciales σθ en función de r
En la Figura 3 se graficó esquemáticamente la distribución de tensiones normales circunferenciales σθ para el caso de un viga rectangular sometida a flexión pura donde R / h = 1. Se puede demostrar aunque es bastante laborioso que cuando R / h → ∞ la ecuación (14) se reduce a la fórmula de flexión compuesta para vigas rectas:
σ= θ
Mz N + ymáx A Iz
(15)
La fórmula para vigas curvas (14) requiere evaluar la integral (10) para calcular el área modificada con gran exactitud por lo mencionado en (11) ya que RA m tiende a A cuando la viga es poco curva y en consecuencia R/h se hace grande. Para facilitar los cálculos, Am está tabulado ( ver Tabla 2 ) para las secciones de uso corriente. Vale aclarar que hay otra formulación para vigas curvas en flexión que primero calcula con gran exactitud la excentricidad (distancia entre el eje baricéntrico y el eje neutro, ver Figura 3).
2.2 Ubicación del eje neutro El eje neutro se obtiene de (14) haciendo σθ = 0 para r = Rn :
Rn =
A A m + ( A − R A m ) N /M z
(16)
que en el caso de flexión pura donde N = 0 se reduce a
R n = A / Am
(17)
Tanto en (16) como en (17) debe calcularse Am con precisión por lo ya mencionado anteriormente con referencia a la ecuación (11).
2.3 Sección compuesta por varias áreas simples A menudo la sección de la viga curva puede descomponerse en varias áreas simples que se encuentran tabuladas como se indica en la Figura 4.
A1 A2
A1
A2
A1
A2
A3
Figura 4: Sección compuesta por varias áreas simples
En estos casos debido a la propiedad aditiva de la integral se tiene
= A
= Ai A = Am R ∑ ( R i Ai ) / A ∑ ∑ i m
(18)
Las fórmulas para calcular A, Am y R para las secciones de uso habitual se muestran en la Tabla 2.
156
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Tabla 2 Expresiones analíticas para A, R y Am = ∫
157
A
( dA / r )
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
3 TENSIONES NORMALES RADIALES σ r La fórmula para la tensión circunferencial σθ, ecuación (14), se derivó con la hipótesis de que la tensión radial σr ( ver Figura 2-b) es despreciable. Esta suposición es correcta en el caso de secciones llenas (circular, rectangular, etc.) pero puede no serlo en el caso de secciones con alma delgada (té, dobleté, etc.).
Figura 5: Variación de las tensiones radiales σr en el espesor de la viga
Para determinar σr aislamos un elemento infinitesimal de viga ABCD como se indica en la Figura 5. Debido a la curvatura de la viga, la resultante, T, de las tensiones circunferenciales σθ, tiene una componente, T sen (dθ /2) , en la dirección de la línea media OL que debe ser equilibrada por tensiones σr según esa dirección. T =
∫
r a
σ θ dA
(19)
Siendo sen (dθ /2) (dθ /2) se puede plantear equilibrio de fuerzas según OL
dθ 2T = σ r t ( r dθ ) 2
→ = σr
T tr
(20)
Sustituyendo (14) en (19) y el resultado de la integral en (20) se llega a:
A A*m − A* Am A* σr N = + Mz tr A t r A ( R Am − A )
(21)
donde = A*m
r
dA
y A ∫= ∫ r *
a
r a
dA
(22)
Notar que este razonamiento es enteramente similar a la deducción de las tensiones de corte de Jourasky, en el caso de vigas rectas. Las tensiones σr se obtienen a partir de las σθ que a su vez fueron deducidas despreciando el efecto de σr. No obstante si se compara el valor de σr dado en (21) con el resultado exacto de la teoría de la elasticidad se comprueba que el error es muy pequeño y está del lado conservativo. Para vigas rectangulares donde R/h > 1 el error es menor del 6 %.
4 CORRECCIÓN DE σθ
EN VIGAS TÉ Y DOBLETÉ
4.1 Pérdida de rigidez y resistencia en las alas de secciones té y dobleté Si se aísla una porción infinitesimal de viga dθ como en la Figura 6-a se observa que debido a la curvatura de la viga se originan componentes radiales porque las fuerzas que actúan sobre las alas (T que tracciona abajo y C que comprime arriba) traccionan el alma originando tensiones σr . Las partes exteriores de las alas están sometidas a flexión y debido a su escasa rigidez se flexionan hacia fuera según se indica en la Figura 6-b.
158
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Esta distorsión origina una pérdida de rigidez y una disminución de las tensiones σθ en los extremos de las alas respecto al valor dado por (14). Esta redistribución de tensiones hace que las tensiones σθ hacia el centro de las alas sean mayores que el valor previsto por (14).
Figura 6: Flexión de las alas causada por la curvatura de la viga
En la Figura 7 se analiza la deformación, muy exagerada para claridad de dibujo, de un elemento infinitesimal de viga. Para el centro del ala, punto 1, el largo inicial es AB, el largo final es AB’ y el acortamiento es BB’. Para el extremo del ala, punto 2, el largo inicial es AB, el largo final es A’’B’’ y el acortamiento es BB’’’. Observando que BB’’’ < BB’ concluimos que la deformación específica εθ y por consiguiente la tensión σθ es menor en el punto extremo 2 que en el punto central 1.
Figura 7: Flexión de las alas causada por la curvatura de la viga
Similarmente se puede analizar el ala inferior. Para la fibra central 3, la longitud inicial es AB, el largo final es AB’ y el alargamiento es BB’. Para la fibra extrema 4, el largo inicial es el mismo, es decir AB, el largo final es A’’B’’ y el alargamiento es BB’’’. Nuevamente resulta que BB’’’ < BB’ y concluimos que el alargamiento específico εθ es menor en los extremos y por consiguiente también resulta menor la tensión σθ . La distorsión analizada aumenta el brazo de palanca de las fuerzas asociadas a σθ de los puntos extremos, pero el aumento de distancia B’ B’’ es insignificante cuando se lo suma a B’N. En cambio la corrección B’ B’’’ es del mismo orden de magnitud que B’B, y por lo tanto tiene un efecto significativo en la disminución de la deformación específica εθ.
159
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
4.2 Factores de corrección de Bleich Una forma práctica de tener en cuenta la variación de la tensión circunferencial σθ en las alas se debe a Bleich y se describe a continuación. a) Sección real
b) Sección reducida
Figura 8: Corrección de Bleich del largo de las alas
Se sigue utilizando la ecuación (14) para determinar σθ pero se reduce el largo de las alas
bi′ 2 (α i i ) + t =
(23)
donde: bi′ = ala reducida, i = parte del semiala en voladizo y t = ancho del alma. El coeficiente α depende de la relación 2 /(r ω ) y se interpola en la Tabla 3 o se calcula con la ecuación (25). Los valores de , r y ω están indicados en la Figura 8. Notar que el radio r se mide hasta la mitad del espesor del ala, y ω son respectivamente la parte en voladizo y el espesor del ala considerada. Notar también que si las dos alas tiene iguales valores para y ω resulta b2′ < b1′ porque los radios de las alas son diferentes ( r2 < r1) → (α2 < α1) ! Tabla 3: Factores de corrección de Bleich α y β
/ (rω )
0,2
0,4
0,6
0,8
1,0
1,2
1,5
2,0
3,0
5,0
α
0,979
0,923
0,850
0,776
0,708
0,651
0,583
0,506
0,422
0,341
β
0,555
1,018
1,347
1,550
1,661
1,713
1,732
1.711
1,674
1,692
2
2
β 1
α 0
0
1
2
3
4
5
→ 2 / (rω )
Gráfico 1: Factores de corrección de Bleich α y β definidos en la ecuación (25)
Cuando se aplica la ecuación (14) a la sección reducida ( no distorsionada) se obtiene una tensión σθ máxima que coincide con el valor máximo en la sección verdadera y distorsionada. Debido a la flexión de las alas (ver Figura 6-b) se originan (en las alas) tensiones normales σz (la dirección de σz está indicado Figura 2-b ) cuyo valor se calcula por medio del coeficiente β deducido por Bleich:
σ z = − β σθ
(24)
donde: β se interpola en la Tabla 3 o se calcula con la ecuación (25) y σθ se calcula usando (14) para la sección reducida empleando el radio correspondiente a la mitad del espesor del ala considerada. El signo menos en (24) se debe a que σz es de signo opuesto a σθ . Notar que σz tiene un valor importante ya que β generalmente es mayor que 1 ( ver Gráfico 1).
160
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Notar que se debe utilizar distinto valor de r para cada una de las alas y por lo tanto distintos valores de α y β. El ala más próxima al centro de curvatura tiene menor radio r dando valores menores de α y valores mayores de β, esta situación es más perjudicial que lo que acontece en el ala más alejada del centro de curvatura. Las expresiones exactas para α y β son las siguientes:
α =
1 senh z + sen z β = λ 2 + cosh z + cos z
3
cosh z − cos z 2 + cosh z + cos z
(25)
y z = 2λ donde: = (26) λ 3 (1 − ν 2 ) / ( r 2ω 2 ) Un caso importante ocurre cuando la semiala es muy larga, en tal caso, para ν = 0,3 la semiala reducida tiene un valor límite dado por lim (α ) = 0,778 r ω (27) 1/4
→∞
entonces:
b′= t + 1,56
rω
(28)
La ecuación (27) se puede demostrar usando (25) y (26) y haciendo ν = 0,3, la deducción se deja para el lector. Ayuda: → ∞ ⇒ z → ∞ ⇒ α → (1/λ) tgh z ⇒ α → 1/λ. La ecuación (28) aparece en los manuales de recipientes con vacío interior que tienen anillos de refuerzo para evitar el pandeo. Usando (28) se adiciona la contribución del espesor del recipiente (ω) al momento de inercia del anillo refuerzo siendo r el radio del cilindro trabajando en vacío. Se recomienda al lector repetir minuciosamente el análisis correspondiente a las Figuras 6 y 7 cambiando el sentido del momento M z. Se observará que la distorsión de las alas es de sentido opuesto y el sentido de d∆θ también se invierte. Se llega a las mismas conclusiones: disminución de rigidez, disminución de tensiones en los extremos de las alas y por consiguiente aumento de tensiones en la zona central. Para el caso de un tubo rectangular hueco solicitado como en el caso de la Figura 6 se producirá tracción en las caras laterales y flexión de las caras superior e inferior. La sección se distorsionará según se indica en la Figura 9-a.
Figura 9: Efecto Bleich en el caso de un tubo rectangular
Cambiando el sentido del momento Mz la distorsión se produce en sentido contrario como se indica en la Figura 9-b. Notar que, tanto en el caso ( a) como en el caso ( b) disminuye la rigidez. Lamentablemente en este caso no se dispone de una fórmula para el factor de corrección.
5 CODOS CON Y SIN PRESIÓN INTERIOR Mediante un razonamiento completamente análogo al anterior se puede demostrar que los codos solicitados en flexión se “ovalizan” y disminuyen notablemente su rigidez, cualquiera sea el sentido del momento flector actuante. La sección ovalizada de la Figura 10-a induce a pensar que el aumento del momento de inercia alrededor del eje x debido a la ovalización podría rigidizar la sección y disminuir las tensiones máximas. Esto no ocurre ya que, según se comentó en la sección anterior, este efecto es despreciable. En cambio, la variación de εθ debido a la curvatura es muy significativa.
Figura 10: Ovalización de un codo flexionado
161
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
El primer estudio de ovalización se debe a Von Kármán y data del año 1911. En esta sección se enuncia sucintamente la metodología a usar. Todo se resume a disminuir la rigidez y aumentar la tensión máxima calculada con la fórmula para vigas rectas en flexión utilizando coeficientes que tienen en cuenta el efecto de la curvatura y la presión interior.
(29) Figura 11: Geometría de un codo y cargas actuantes
5.1 Codos sin presión interior En la Figura 11 se indica el radio medio del caño rm ( hasta la mitad del espesor ), el radio del codo R y el espesor del caño t. La rigidez flexional del codo (EI ) o es menor que la rigidez nominal (EI ) nom correspondiente a una viga recta:
= Io Ω = donde: I nom π rm3 t o I nom
(30)
donde Ωo es el factor de disminución de rigidez flexional por ovalización de la viga curva dado en (33). La tensión máxima para verificación σ o se encontró como la combinación más desfavorable de tensiones membranales (longitudinales y circunferenciales), tensiones flexionales (longitudinales y circunferenciales) debidas a la ovalización y tensiones de corte por torsión,
= σ o η= donde: σ nom o σ nom
M rext I nom
(31)
donde ηo es el factor de incremento de tensión por la ovalización de la viga curva y M es el momento resultante dado en (29) que está indicado en la Figura 11 y corresponde al criterio de Tresca. Para determinar los factores Ωo y ηo debidos a la ovalización se definen previamente dos factores adimensionales λ y γ:
= λ
Rt = γ rm2 1 − ν 2
Luego = Ωo 0,6 λ
restringido a
= ηo λ − 0,667 (1 + 0, 25 /γ )
R rm
(32)
λ≤1 restringido a
(33)
0,05 ≤ λ ≤ 1
(34)
5.2 Codos con presión interior Por efecto de la presión interior ‘p’ aparecen tensiones membranales que tienden a devolver la forma circular al codo ovalizado y esto modifica los valores asociados a la ovalización: cuando: 0,05 ≤ λ ≤ 1 y 0 ≤ ψ ≤ 0,1
donde:
Ω = 1+1,75 λ −1,333 e −1,15 ψ
σ = 1+λ −1,333 e − ψ
I = (Ω I ) Ω o nom p σ p = (ηo σ nom ) / σ
(35) (36)
− 0,25
(37)
− 0,25
(38)
siendo ψ un parámetro adimensional proporcional a la presión:
162
ψ =
p R2 E rm t
(39)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
6 CÁLCULO DE DESPLAZAMIENTOS EN UNA VIGA CURVA 6.1 Energía de deformación en un tramo de viga curva A los efectos del cálculo de desplazamientos es necesario plantear correctamente la energía de deformación para el elemento infinitesimal de viga curva correspondiente a dθ, bajo la acción simultánea de M z, Q y N de acuerdo a la Figura 2.
W =
∫
Am (M z ) 2 Mz N Q2 N2 R dθ + ∫ R dθ + ∫ dθ − ∫ dθ 2 Ac G 2 AE 2 AE ( RAm − A) AE
(40)
El primer término es energía por corte, el segundo es energía por solicitación axial, el tercero corresponde a la flexión y el cuarto se debe al acoplamiento entre M z y N. Ese último término se explica porque al girar la sección alrededor del eje neutro produce un desplazamiento del eje baricéntrico donde actúa N. Debe tenerse cuidado al asignar los signos de M z y N en el término de acoplamiento: N es positivo si es de tracción y M z es positivo si trata de disminuir la curvatura de la viga. Para secciones té y dobleté debe considerarse la sección reducida por el efecto Bleich según (23) y en el caso de codos debe utilizarse el momento de inercia reducido según (30) y (33).
6.2 Desplazamiento de un punto de una viga curva Para calcular la componente del desplazamiento de un punto de una viga curva en una dirección dada se puede aplicar el teorema de Castigliano. Para ello: i ) se aplica un fuerza ficticia “X ” en el punto donde se quiere calcular el desplazamiento y en la dirección deseada, ii ) se determinan los esfuerzos N, Q y M z causados por todas las fuerzas aplicadas (incluyendo la fuerza ficticia X ) , iii ) se computa la energía de deformación W(X) usando la ecuación (40), iv) se calcula la derivada de la energía de deformación respecto de X:
u( X ) =
∂W( X )
(41)
∂X
y finalmente v ) se reemplaza en u(X) a la fuerza ficticia por su verdadero valor: X = 0. Resulta obvio que cuando se quiere conocer la componente del desplazamiento de un punto donde esta aplicada una carga P, dato del problema y en la dirección de la carga P, no hace falta utilizar la carga ficticia. Basta reemplazar X por P en la ecuación (41). Nota importante: Los desplazamientos están menos influenciados por la curvatura de la viga que las tensiones circunferenciales σθ. Por ello para valores R/h > 3 se pueden reemplazar el 3er y 4to término del segundo miembro de (40) por el término habitual que corresponde a la flexión de vigas rectas dado en (42):
∫
M z2 R dθ 2 EI
(42)
simplificando notablemente los cálculos y cometiendo un error menor al 2 %. Adicionalmente los cálculos se pueden realizar de una manera más eficiente derivando según (41) previo a realizar la integración (42) :
= u( X )
∂W( X ) = ∂X
∂ ∂X
∫
(M z ( X ) )2 = R dθ 2 EI
∫
M z (X ) ∂ M z (X ) ∂X EI
R dθ
(43)
X =0
ya que si en algún tramo de la integral se anula alguno de los términos dentro del corchete la integral en ese tramo no se realiza porque resulta nula. En los casos donde predomina la flexión puede ignorarse la contribución del esfuerzo axial N y del corte Q y si además R/h > 3 todo el cálculo queda reducido a lo indicado en (43).
163
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
PRÁCTICO
Vigas curvas
Nota: Todos los datos están dados en unidades [cm] y [kg]
1 Determinar el coeficiente de seguridad del gancho del croquis para una carga máxima de 6000 kg. Comparar el resultado obtenido con la teoría de viga curva con el correspondiente a viga recta. Material: acero σf = 2800 kg/cm2
2 Calcular el desplazamiento vertical del punto A debido a la carga F que produce fluencia. Aro con un radio medio de 4 cm. Material: acero σf = 2800 kg/cm2 Comparar resultados considerando viga curva y viga recta.
3 Determinar el coeficiente de seguridad de la prensa del croquis para una carga máxima de 1200 kg. Material: acero σf = 3420 kg/cm2 Ayuda: Emplear corrección de Bleich y calcular la tensión circunferencial en el punto A.
4 Un codo de 90º sin presión interior empotrado en el extremo A tiene una carga perpendicular a su plano en el extremo libre B. Espesor: t = 0,2 cm
Material: acero σf = 4000 kg/cm2
Se pide: a) Calcular la máxima carga isible con CS = 2 b) Repetir el cálculo ignorando la ovalización del codo (usando teoría de viga recta). c) Comparar los resultados obtenidos.
5 Para calcular la matriz de rigidez de un codo se comienza calculando la matriz de flexibilidad para un extremo libre considerando el otro extremo como empotrado.
F11 F 21 F31
F12 F22 F32
F13 P1 u1 F23 P2 = u2 F33 M φ
Material: acero E = 2100000 kg/cm2 ν = 0,3 Calcular F31 empleando el teorema de Castigliano. a) Codo sin presión interior. b) Codo con presión interior p = 40 kg/cm2 Ayuda: Considerar teoría de vigas rectas teniendo en cuenta la pérdida de rigidez por ovalización a través de Io dado por la ecuación (30).
164
R = 12
rm = 4
t = 0,2
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
SOLUCIÓN del PRÁCTICO
Vigas curvas
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
Nota: Todos los resultados parciales y finales se dan unidades [cm] y [kg]
1 Cálculo del coeficiente de seguridad de un gancho para una carga de 6000 kg. 1.a Solución exacta como viga curva Propiedades: Tabla 2 caso 3...... = A 12 x (8 + 2 )/2 ................................ A = 60
[6 x ( 2 x 8 + 2) + 1 x8(8 + 2 x 2 )] / [3 x (8 + 2 )] ................................ R = 10,8 = Am ( 8 x 18 − 2 x 6 ) x ln (18 /6) / 12 − 8 + 2 .............................. Am = 6,0847352
= R
1 6,0847352 6000 6000 x 10,8 = + − ....... σ θ = 839,9 60 10,8 x 6,0847352 − 60 6 60 = CS σ= 2800 / = 839,9 3,33 ................................................ CS = 3,33 f /σ θ Ec. (14) → σ θ
1.b Solución aproximada con viga recta h= 12 ; b1= 8 ; b2 =2 ; I = h3 ( b12 + 4 b1 b2 + b22 ) / [36 ( b1 + b2 )]= 633,6 ; M 6000 = = x 10,8 64800 6000 64800 6000 64800 σ máx = 636, 4 σA = + + 590,9 σ B = − − 636, 4 (10,8 − 6) = (18 − 10,8) = 60 633, 6 60 633, 6 = CS σ= 2800 /636, 4 ............................................................................................. Cs = 4, 40 f /σ máx La tensión máxima como viga recta es 24 % menor, tiene signo opuesto y ocurre en un punto distinto.
2 Determinación del desplazamiento vertical del punto A causado por la carga que produce fluencia. 2.a Carga que produce fluencia Propiedades: Tabla 2 caso 4.....b = 0,5 →= A π= b 2 π x (0,5) 2 .......... A = 0,7854 R = 4................................................................................................................ R = 4 Am = 2 π ( R − R 2 − b 2 )= 2 π ( 4 − 42 − (0,5) 2 ) ................... Am = 0,1971226 1 0,1971226 −F −F x 4 = + − ... σ θ = − 46, 23 F 0,7854 4 x 0,1971226 − 0,7854 3,5 0,7854 = σ θ σ= 46, 23 F ; = σ f 2800 ; σ= σf ⇒ F = 60,57 kg máx máx Ec. (14) →
σθ
r = 3,5
Se puede verificar que la fórmula para vigas rectas predice F = 66,64 kg, con un error del 10 %. 2.b Cálculo del desplazamiento del punto A
− F ( R sen θ ) Q == F cos θ ; N − F sen θ ; M z =
Esfuerzos:
W =∫
Ec. (40) →
E ∂W = 0,385 E= ; Ac 0,85= A; 2(1 + ν ) ∂F
= G
∫
π
0
( F cos θ ) 2 (− F sen θ )2 R dθ + ∫ R dθ + 2 Ac G 2 AE Am (− F R sen θ ) 2 (− F R sen θ ) (− F sen θ ) dθ ∫ 2 AE ( RAm − A) dθ − ∫ AE
sen 2θ = dθ
= uF
∂W = ∂F
∫
π
0
cos 2θ = dθ
π 2
∂W = ∂F
;
π x 60,57 x 4 2 x 2100000 x 0,7854
π F R cos 2 θ + sen 2 θ + 255 sen 2 θ − 2 sen 2 θ dθ ∫ E A 0 0,85 x 0,385
πFR 2E A
[
+ 3,05 corte
x
= ( 257,05 )
+
1
normal
+ 255 −
2
]
flexión acople
0,0593 ....................................... u F = 0,0593 cm
Es importante destacar que usando la teoría de viga recta con una carga P = 60,57 kg se obtiene un desplazamiento uF = 0,060 cm con un error de apenas el 1,2 %. Esto confirma que el efecto de viga curva en los desplazamientos es mucho menor que en las tensiones. 165
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
3 Cálculo del coeficiente de seguridad de una prensa para carga máxima de 1200 kg. 3.a Corrección de las alas usando la corrección de Bleich, ecuación (23)
α = 0,9961 β = 0, 2421 Ec. (23) = → b1′ 2 (α1 = 2 x ( 0,9961 x 0,7 ) + 1, 2 ........................ b1′ = 2,5945 1) + t [3x (1 − 0,32 ) /( 7, 22 x 0,82 )] 0,25 = 0,535586 λ = Ec. (26) → Ec. (25) → = λ 2 x 0,535586 x = 0,7 0,749821 z 2=
α = 0,9381 = λ 2 x 0,637937 x= 1, 2 1,5310 z 2= β = 0,9244 Ec. (23)= → b2′ 2 (α 2 = 2 x ( 0,9381 x 1, 2 ) + 1, 2 ...................... b2′ = 3, 4514 2)+t λ = [3x (1 − 0,32 )/(2,92 x1, 42 )] 0,25 = 0,637937
Ec. (26) →
Ec. (25) →
3.b Cálculo del área A, del área modificada Am y del radio R de la sección reducida = A1 2,5945 = x 0,8 2,0756
= A2 1,= 2 x 3, 2 3,84
6,8 = Am 2 1,= 2 x ln 0,763186 3,6 R2 = 5, 2 ( 3,6 + 6,8) / 2 =
7,6 = Am1 2,5945 = x ln 0, 288575 6,8 R1 = 7, 2 ( 6,8 + 7,6 ) / 2 =
Propiedades de la sección compuesta A = A1 + A2 + A3 = 10,7476
= A3 3,= 4514 x 1, 4 4,8320
3,6 = Am 3 3,= 4514 x ln 1,699733 2, 2 R3 = 2,9 ( 2, 2 + 3,6 ) / 2 =
Am = Am1 + Am 2 + Am 3 = 2,751494 R = ( A1 R1 + A2 R2 + A3 R3 ) / A = 4,55219
3.c Cálculo de las tensiones variables en el espesor Esfuerzos:... N = 1200 kg= M 1200 x ( 7,3 + 4,55219) ......... M = 14222,63 kg -cm 8000, 4 1 2, 75149 1200 14222, 63 −1936,5 + = + − .. σ θ = r 10, 7476 4,5522 x 2, 751494 − 10, 7476 r 10, 7476 Tensión transversal: Ec. (24) → σ z = − β σ θ Punto 1: σ z1 = − 0,9244 x σ θ r =2,9 = − 760 Ec. (14) →.. σ θ
Punto 7: Punto r
σθ σz σ*
r
Tensión de von Mises σ *= − 0, 2421 x σ θ r =7,2 = σ z7 = 200 1 2,2 1700 – 760 2181
Ala superior 2 2,9 822 0 822
3 3,6–ε 286 760 665
4 3,6+ε 286 0 286
Alma 5 4,132 0 0 0
6 6,8–ε – 760 0 760
7 6,8+ε – 760 200 878
σ θ2 + σ z2 − σ θ σ z Ala inferior 8 9 7,2 7,6 – 826 – 884 0 – 200 826 803
3.d Gráfico de las tensiones
3.e Determinación del coeficiente de seguridad = CS σ= 3420= /2181 1,57 .................................................................................. f /σ θ
166
CS = 1,57
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
4 Determinación de la carga isible aplicable en un extremo de un codo sin presión. 4.a Cálculo teniendo en cuenta la ovalización de la viga curva Propiedades geométricas del codo: R =(14,6 + 9, 4) / 2 =12 ....................................................... R = 12 rm= (14,6 − 9, 4 − 0, 2) / 2= 2,5 ........................................ rm = 2,5
t = 0,2 .................................................................................. t = 0, 2 Momento de inercia nominal (como viga recta): Ec. (30) →= I nom π= rm3 t π x (2,5)3 x 0, 2 ..................... I nom = 9,8175 Momento resultante M para usar en el codo: Ec.= (29) → M
(12 P ) 2 + (12 P ) 2 .......................... M = 16,97 P
Relaciones geométrica adimensionales de la viga curva: Ec. (32) → ... γ R= = / rm 12= / 2,5 4,8 .......................................................................... γ = 4,8
= λ Ec. (32) →
2 1 −ν = ) 12 x 0, 2 / (2,52
R t / (rm2
1 − 0,32
) .......................
λ = 0, 4025
Incremento de tensiones por efecto de ovalización: Ec. (34) → 0,05 ≤ λ ≤ 1
→= ηo λ − 0,667 (1 + 0, 25= / γ ) 0, 4025 − 0,667 (1 + 0, 25 / 4,8) ..... ηo = 1,93
Tensión máxima considerando ovalización: M 16,97 x P x 2,6 ................................ σ o = 8,674 P ηo = rext 1,93 x Ec. (31)= → σ o η= o σ nom I nom 9,8175 Determinación de la carga isible:
σo = σ f / CS
⇒
8,674 P = 4000 / 2 …………….……….…..….….. P = 230,6 kg
Notar que se ha considerado que el empotramiento no impide la ovalización. 4.b Cálculo ignorando la ovalización (teoría de viga recta) Momento de inercia como viga de pared delgada Ec. (30)= → I rm3 t π x (2,5)3 x 0, 2 ...................................................................... I = 9,8175 π= Módulo de torsión (JR del tubo circular de pared delgada ) = J R 2= π (rm )3 t 2 x π x (2,5)3 x 0, 2 .................................................................... J R = 19,635 Tensión normal por flexión en el extremo A: 12 x P M x 2,6 ................................. σ = 3,178 P σ = = rext 9,8175 I Tensión de corte por torsión en el extremo A: T 12 x P x 2,6 .................................. τ = 1,589 P = τ = rext JR 19,635 Tensión efectiva de von Mises
σ* =
σ 2 + 3τ 2 =
(3,178 P ) 2 + 3 x (1,589 P ) 2 ............................................. σ * = 4, 204 P
Carga isible con coeficiente de seguridad igual a 2:
σ* = σ f / CS
⇒
4, 204 P = 4000 /2 ………..……→…....…….….. P = 475,7 kg
4.c Comparación de los resultados En este caso al comparar los resultados 4.a y 4.b, se observa que debido al efecto de viga curva se pierde más del 50 % de la resistencia debido a la ovalización !!!!!!
167
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
5 Cálculo de un elemento de la matriz de flexibilidad de un codo como viga curva. El elemento F31 de la matriz de flexibilidad es igual al giro φ en radianes producido por una carga unitaria horizontal de valor unitario: P1 = 1 kg. Para resolver empleando el teorema de Castigliano se coloca un momento ficticio M o en el extremo libre que se anula después de derivar.
Q = 1 sen θ Esfuerzos: N = 1 cos θ M =M o − R (1 − cos θ )
R = 12
rm = 4
t = 0,2
Área de la sección plana de pared delgada: = x π x rm x t 2 x π x 4 x 0, 2 .................... A = 5,03 A 2= Relación geométrica adimensional λ de la viga curva:
= λ Ec. (32) →
1 − ν 2= ) 12 x 0, 2 / (42
R t / (rm2
1 −ν 2
) .......................................
λ = 0,15724
Disminución de la rigidez Ωo : Ec. (33) →
λ < 1 → Ω= 0,6 x= λ 0,6 x 0,15724 .................................................... Ωo =0,09434 o
Comentario : como la curvatura es elevada [R/(2rm ) = 1,5] y el espesor es pequeño ( t << rm ) el efecto perjudicial de la ovalización es muy importante y la flexibilidad aumenta más del 1000 % !!! Momento de inercia nominal I nom y reducido I o : Ec. (30) →
= I nom π= rm3 t π x 43 x 0, 2 ............................................................................. I nom = 40, 21
= Ec. (30) → Io
Ω = 0,09434 x 40, 21 ..................................................................... I o = 3,794 o I nom
5.a Flexibilidad del codo sin presión interior Energía de deformación elástica:
[ M o − R (1 − cos θ )] R dθ − [ M o − R (1 − cos θ )] cos θ dθ sen 2 θ cos 2 θ W =∫ R dθ + ∫ R dθ + ∫ ∫ 2 Ac G 2 AE 2E Io AE 2
Ec. (40) y (42) →
Derivada de la energía de deformación respecto al momento ficticio: ∂W = 0 + 0 + ∂M o
∂W F31o = ∂M o M
o
π /2
∫ 0
π /2 M o − R (1 − cos θ ) cos θ R dθ − ∫ dθ E Io AE 0
R2 θ − sen θ = − E Io =0
π /2 0
−
1 sen θ EA
π /2 0
(−1,0276 − 0,0095) x10−5 =
F31o = − 1,04 x10−5 rad / kg
5.b Flexibilidad del codo con presión interior El único cambio respecto al caso 5.a es el incremento de la rigidez por el efecto estabilizante de la presión interior aplicada al codo. Esto se traduce en un incremento del momento de inercia reducido lo que disminuye de manera inversamente proporcional la deformación por flexión. Parámetro adimensional de presión ψ : Ec. (39) → ψ = p= R 2 / ( E rm t ) 40 x 122 /(2100000 x 4 x 0, 2 ) ..................................... ψ = 0,003429 Incremento de rigidez Ω : Ec. (35) →
Ω
− 0,25
−1,333 −1,15 x 0,003429 = x (0,15724) xe 1+1,75 1,178 → I p = Ω I o ←
Ω = 1,178
La rigidez del codo aumenta un 18 % debido a la presión interior que es estabilizante, en consecuencia: p −5 F31p = (−1,0276 / Ω − 0,01) x 10−5 = (−1,0276 /1,178 − 0,0095) x 10−5 .... F31 = − 0,882 x10 rad / kg
168
J.Massa-J.Giro-A.Giudici - 2015
Capítulo 9
VIGAS CURVAS 1 INTRODUCCIÓN La fórmula de la flexión simple, σ = M / W, da resultados correctos para las vigas rectas cargadas simétricamente en flexión pura. También se la utiliza para vigas rectas cargadas por corte cuando las cargas pasan por el centro de corte y en tal caso el error es despreciable si el largo de la viga es mucho mayor que el alto de la misma. En el caso de vigas curvas donde el radio de curvatura es mayor que cinco veces la altura de la viga, la fórmula de flexión simple da resultados aceptables, pero los errores son importantes cuando el radio de curvatura es comparable con la altura de la viga. Por ello es necesario encontrar una solución que, aun siendo aproximada, de resultados satisfactorios para el caso de grandes curvaturas. La teoría de vigas curvas que se presenta en este capítulo se basa fundamentalmente en dos hipótesis simplificativas: 1) Las secciones planas perpendiculares a la línea baricéntrica permanecen planas después de la deformación. 2) Tanto la tensión radial σr como la tensión de corte τ son suficientemente pequeñas para poder considerar al problema como unidimensional (ver Figura 1-b). La fórmula para las tensiones normales circunferenciales σ θ que resulta de estas dos hipótesis se denomina “fórmula para vigas curvas en flexión”. En la próxima sección se demuestra que debido a la curvatura de la viga las secciones planas no giran alrededor del eje baricéntrico y además la ley para las tensiones normales σ θ no sigue una ley lineal sino hiperbólica.
Figura 1: Equilibrio de un elemento de viga curva
2 TENSIONES NORMALES CIRCUNFERENCIALES σθ En la Figura 2-a se considera un elemento infinitesimal de viga definido por los puntos 1, 2, 3 y 4. Las cargas exteriores producen en la sección considerada esfuerzos flexionales, cortantes y normales que deben equilibrarse por tensiones normales σθ y de corte τ. Hay que tener presente que se consideran secciones simétricas y cargas actuando en el plano de simetría, por lo tanto no hay torsión. Las tensiones de corte producen alabeo de la sección plana y modifican levemente la tensión σθ. Es usual despreciar el efecto del corte τ salvo en el caso de vigas con alma muy delgada.
153
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Figura 2: Elemento infinitesimal de viga curva
Las tensiones transversales σz (ver Figura 2-b ) son despreciables por lo que estamos en presencia de un caso de tensión plana.
2.1 Fórmula de la flexión compuesta para vigas curvas Considerando equilibrio de fuerzas en dirección circunferencial ( eje x en la Figura 2-a ) se tiene:
∫
A
∫
A
0 σ θ dA − N =
(1)
0 σ θ ( R − r ) dA − M z =
(2)
Estas integrales no pueden ser evaluadas si no se conoce la relación entre σθ y el radio r. Esa relación se obtiene de la hipótesis cinemática de que las secciones planas rotan alrededor del eje neutro y permanecen planas. Hay que tener presente que a esta altura de la formulación la posición del eje neutro es desconocida. El alargamiento eθ es función lineal de la distancia a la fibra neutra ( R n – r ) pero debido a que el largo inicial varía con el radio r se obtiene una variación no lineal para las deformaciones específicas εθ.
= εθ
eθ = r dθ
∆ ( dθ ) dθ Por la ley de Hooke se tiene:
donde:
(R
n
− r ) ∆ ( dθ ) R n = − 1 ω r dθ r
ω=
= σ θ ε= θ E
(3) (4)
Rn − r r
= ωE
Eω R n r
− Eω
(5)
Notar que en (5) se ha despreciado el efecto de la tensión radial σr. Según se observa en la Figura 1-b debería ser: 1 = εθ (6) (σ θ − ν σ r ) E luego
= σ θ εθ E + ν σ r
(7)
El término ( ν σr ) puede despreciarse porque σr en mucho menor que σθ y además el máximo de σr no coincide con los máximos de σθ .
154
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Sustituyendo (5) en (1) y (2) y reordenando se tiene:
= N R n E ω Am − Eω A
(8)
= M z R n Eω ( R Am − A )
(9)
donde A es el área de la sección y Am es el “área modificada” dA (10) r Notar que los elementos de área más alejados del centro de curvatura (r grande ) contribuyen menos al área modificada, además Am resulta levemente superior a ( A/R ): Am =
Am ≈ A / R
∫
A
Am > A / R
y también:
(11)
La ecuación (9) puede reescribirse como:
Mz R Am − A Sustituyendo (12) en (8) y despejando Eω se tiene Am M z N = − Eω A A ( R Am − A ) R n Eω =
(12)
(13)
Finalmente sustituyendo (12) y (13) en (5) se tiene
Am 1 Mz N σθ = + − A R Am − A r A
(14)
que es la fórmula de la flexión compuesta para vigas curvas. Nota: N positivo indica tracción y M z positivo implica tracción en las fibras del radio interior ( puntos más próximos al centro de curvatura ). La tensión circunferencial σθ dada por (14) tiene una variación hiperbólica debida al término (1/r ) como se puede apreciar en la Figura 3. Cuando la viga es “poco curva” los valores de “r ” son grandes respecto a la altura de la viga y entonces la variación se hace casi lineal concordando con los valores provistos por la fórmula de flexión simple para viga recta (15). Notar que en la derivación de la ecuación (14) se plantearon ecuaciones de equilibrio (1) y (2), cinemáticas (3) y constitutivas (5). Hay que tener presente que la “fórmula” (14) para vigas curvas en flexión es todavía aproximada debido a las numerosas hipótesis simplificativas usadas en su derivación. Los valores hallados con la fórmula de vigas curvas (14) pueden compararse con los resultados exactos provistos por la teoría de la elasticidad como también por la fórmula menos exacta (15) que se usa para vigas rectas. En la Tabla 1 se presentan los cocientes entre las tensiones máximas provistas por las diferentes teorías para el caso de una sección rectangular sometida a flexión pura para varias relaciones entre el radio R y la altura de la viga h (R y h están indicados en las Figuras 2 y 3). Tabla 1: Comparación entre los resultados provistos por distintas teorías
σ θ viga curva
σ θ viga recta
R h
σ θ teoría elasticidad
σ θ teoría elasticidad
error %
0,75
1,012
0,526
47 %
1
0,997
0,654
35 %
2
0,997
0,831
17 %
5
0,999
0,933
7%
Como en los casos prácticos generalmente R / h > 1, los resultados de la fórmula para vigas curvas pueden considerarse exactos. La teoría de viga recta da un error del 7 % cundo R / h = 5 y el error crece hasta el 35 % cundo R/ h = 1.
155
Compendio de Cálculo Estructural II – FCEFyN – UNC
σθ máx fórmula viga recta
Mz o R
J.Massa-J.Giro-A.Giudici - 2015
σθ máx fórmula viga curva
r eje neutro
h
eje baricéntrico excentricidad Figura 3: Variación hiperbólica de las tensiones circunferenciales σθ en función de r
En la Figura 3 se graficó esquemáticamente la distribución de tensiones normales circunferenciales σθ para el caso de un viga rectangular sometida a flexión pura donde R / h = 1. Se puede demostrar aunque es bastante laborioso que cuando R / h → ∞ la ecuación (14) se reduce a la fórmula de flexión compuesta para vigas rectas:
σ= θ
Mz N + ymáx A Iz
(15)
La fórmula para vigas curvas (14) requiere evaluar la integral (10) para calcular el área modificada con gran exactitud por lo mencionado en (11) ya que RA m tiende a A cuando la viga es poco curva y en consecuencia R/h se hace grande. Para facilitar los cálculos, Am está tabulado ( ver Tabla 2 ) para las secciones de uso corriente. Vale aclarar que hay otra formulación para vigas curvas en flexión que primero calcula con gran exactitud la excentricidad (distancia entre el eje baricéntrico y el eje neutro, ver Figura 3).
2.2 Ubicación del eje neutro El eje neutro se obtiene de (14) haciendo σθ = 0 para r = Rn :
Rn =
A A m + ( A − R A m ) N /M z
(16)
que en el caso de flexión pura donde N = 0 se reduce a
R n = A / Am
(17)
Tanto en (16) como en (17) debe calcularse Am con precisión por lo ya mencionado anteriormente con referencia a la ecuación (11).
2.3 Sección compuesta por varias áreas simples A menudo la sección de la viga curva puede descomponerse en varias áreas simples que se encuentran tabuladas como se indica en la Figura 4.
A1 A2
A1
A2
A1
A2
A3
Figura 4: Sección compuesta por varias áreas simples
En estos casos debido a la propiedad aditiva de la integral se tiene
= A
= Ai A = Am R ∑ ( R i Ai ) / A ∑ ∑ i m
(18)
Las fórmulas para calcular A, Am y R para las secciones de uso habitual se muestran en la Tabla 2.
156
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Tabla 2 Expresiones analíticas para A, R y Am = ∫
157
A
( dA / r )
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
3 TENSIONES NORMALES RADIALES σ r La fórmula para la tensión circunferencial σθ, ecuación (14), se derivó con la hipótesis de que la tensión radial σr ( ver Figura 2-b) es despreciable. Esta suposición es correcta en el caso de secciones llenas (circular, rectangular, etc.) pero puede no serlo en el caso de secciones con alma delgada (té, dobleté, etc.).
Figura 5: Variación de las tensiones radiales σr en el espesor de la viga
Para determinar σr aislamos un elemento infinitesimal de viga ABCD como se indica en la Figura 5. Debido a la curvatura de la viga, la resultante, T, de las tensiones circunferenciales σθ, tiene una componente, T sen (dθ /2) , en la dirección de la línea media OL que debe ser equilibrada por tensiones σr según esa dirección. T =
∫
r a
σ θ dA
(19)
Siendo sen (dθ /2) (dθ /2) se puede plantear equilibrio de fuerzas según OL
dθ 2T = σ r t ( r dθ ) 2
→ = σr
T tr
(20)
Sustituyendo (14) en (19) y el resultado de la integral en (20) se llega a:
A A*m − A* Am A* σr N = + Mz tr A t r A ( R Am − A )
(21)
donde = A*m
r
dA
y A ∫= ∫ r *
a
r a
dA
(22)
Notar que este razonamiento es enteramente similar a la deducción de las tensiones de corte de Jourasky, en el caso de vigas rectas. Las tensiones σr se obtienen a partir de las σθ que a su vez fueron deducidas despreciando el efecto de σr. No obstante si se compara el valor de σr dado en (21) con el resultado exacto de la teoría de la elasticidad se comprueba que el error es muy pequeño y está del lado conservativo. Para vigas rectangulares donde R/h > 1 el error es menor del 6 %.
4 CORRECCIÓN DE σθ
EN VIGAS TÉ Y DOBLETÉ
4.1 Pérdida de rigidez y resistencia en las alas de secciones té y dobleté Si se aísla una porción infinitesimal de viga dθ como en la Figura 6-a se observa que debido a la curvatura de la viga se originan componentes radiales porque las fuerzas que actúan sobre las alas (T que tracciona abajo y C que comprime arriba) traccionan el alma originando tensiones σr . Las partes exteriores de las alas están sometidas a flexión y debido a su escasa rigidez se flexionan hacia fuera según se indica en la Figura 6-b.
158
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Esta distorsión origina una pérdida de rigidez y una disminución de las tensiones σθ en los extremos de las alas respecto al valor dado por (14). Esta redistribución de tensiones hace que las tensiones σθ hacia el centro de las alas sean mayores que el valor previsto por (14).
Figura 6: Flexión de las alas causada por la curvatura de la viga
En la Figura 7 se analiza la deformación, muy exagerada para claridad de dibujo, de un elemento infinitesimal de viga. Para el centro del ala, punto 1, el largo inicial es AB, el largo final es AB’ y el acortamiento es BB’. Para el extremo del ala, punto 2, el largo inicial es AB, el largo final es A’’B’’ y el acortamiento es BB’’’. Observando que BB’’’ < BB’ concluimos que la deformación específica εθ y por consiguiente la tensión σθ es menor en el punto extremo 2 que en el punto central 1.
Figura 7: Flexión de las alas causada por la curvatura de la viga
Similarmente se puede analizar el ala inferior. Para la fibra central 3, la longitud inicial es AB, el largo final es AB’ y el alargamiento es BB’. Para la fibra extrema 4, el largo inicial es el mismo, es decir AB, el largo final es A’’B’’ y el alargamiento es BB’’’. Nuevamente resulta que BB’’’ < BB’ y concluimos que el alargamiento específico εθ es menor en los extremos y por consiguiente también resulta menor la tensión σθ . La distorsión analizada aumenta el brazo de palanca de las fuerzas asociadas a σθ de los puntos extremos, pero el aumento de distancia B’ B’’ es insignificante cuando se lo suma a B’N. En cambio la corrección B’ B’’’ es del mismo orden de magnitud que B’B, y por lo tanto tiene un efecto significativo en la disminución de la deformación específica εθ.
159
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
4.2 Factores de corrección de Bleich Una forma práctica de tener en cuenta la variación de la tensión circunferencial σθ en las alas se debe a Bleich y se describe a continuación. a) Sección real
b) Sección reducida
Figura 8: Corrección de Bleich del largo de las alas
Se sigue utilizando la ecuación (14) para determinar σθ pero se reduce el largo de las alas
bi′ 2 (α i i ) + t =
(23)
donde: bi′ = ala reducida, i = parte del semiala en voladizo y t = ancho del alma. El coeficiente α depende de la relación 2 /(r ω ) y se interpola en la Tabla 3 o se calcula con la ecuación (25). Los valores de , r y ω están indicados en la Figura 8. Notar que el radio r se mide hasta la mitad del espesor del ala, y ω son respectivamente la parte en voladizo y el espesor del ala considerada. Notar también que si las dos alas tiene iguales valores para y ω resulta b2′ < b1′ porque los radios de las alas son diferentes ( r2 < r1) → (α2 < α1) ! Tabla 3: Factores de corrección de Bleich α y β
/ (rω )
0,2
0,4
0,6
0,8
1,0
1,2
1,5
2,0
3,0
5,0
α
0,979
0,923
0,850
0,776
0,708
0,651
0,583
0,506
0,422
0,341
β
0,555
1,018
1,347
1,550
1,661
1,713
1,732
1.711
1,674
1,692
2
2
β 1
α 0
0
1
2
3
4
5
→ 2 / (rω )
Gráfico 1: Factores de corrección de Bleich α y β definidos en la ecuación (25)
Cuando se aplica la ecuación (14) a la sección reducida ( no distorsionada) se obtiene una tensión σθ máxima que coincide con el valor máximo en la sección verdadera y distorsionada. Debido a la flexión de las alas (ver Figura 6-b) se originan (en las alas) tensiones normales σz (la dirección de σz está indicado Figura 2-b ) cuyo valor se calcula por medio del coeficiente β deducido por Bleich:
σ z = − β σθ
(24)
donde: β se interpola en la Tabla 3 o se calcula con la ecuación (25) y σθ se calcula usando (14) para la sección reducida empleando el radio correspondiente a la mitad del espesor del ala considerada. El signo menos en (24) se debe a que σz es de signo opuesto a σθ . Notar que σz tiene un valor importante ya que β generalmente es mayor que 1 ( ver Gráfico 1).
160
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
Notar que se debe utilizar distinto valor de r para cada una de las alas y por lo tanto distintos valores de α y β. El ala más próxima al centro de curvatura tiene menor radio r dando valores menores de α y valores mayores de β, esta situación es más perjudicial que lo que acontece en el ala más alejada del centro de curvatura. Las expresiones exactas para α y β son las siguientes:
α =
1 senh z + sen z β = λ 2 + cosh z + cos z
3
cosh z − cos z 2 + cosh z + cos z
(25)
y z = 2λ donde: = (26) λ 3 (1 − ν 2 ) / ( r 2ω 2 ) Un caso importante ocurre cuando la semiala es muy larga, en tal caso, para ν = 0,3 la semiala reducida tiene un valor límite dado por lim (α ) = 0,778 r ω (27) 1/4
→∞
entonces:
b′= t + 1,56
rω
(28)
La ecuación (27) se puede demostrar usando (25) y (26) y haciendo ν = 0,3, la deducción se deja para el lector. Ayuda: → ∞ ⇒ z → ∞ ⇒ α → (1/λ) tgh z ⇒ α → 1/λ. La ecuación (28) aparece en los manuales de recipientes con vacío interior que tienen anillos de refuerzo para evitar el pandeo. Usando (28) se adiciona la contribución del espesor del recipiente (ω) al momento de inercia del anillo refuerzo siendo r el radio del cilindro trabajando en vacío. Se recomienda al lector repetir minuciosamente el análisis correspondiente a las Figuras 6 y 7 cambiando el sentido del momento M z. Se observará que la distorsión de las alas es de sentido opuesto y el sentido de d∆θ también se invierte. Se llega a las mismas conclusiones: disminución de rigidez, disminución de tensiones en los extremos de las alas y por consiguiente aumento de tensiones en la zona central. Para el caso de un tubo rectangular hueco solicitado como en el caso de la Figura 6 se producirá tracción en las caras laterales y flexión de las caras superior e inferior. La sección se distorsionará según se indica en la Figura 9-a.
Figura 9: Efecto Bleich en el caso de un tubo rectangular
Cambiando el sentido del momento Mz la distorsión se produce en sentido contrario como se indica en la Figura 9-b. Notar que, tanto en el caso ( a) como en el caso ( b) disminuye la rigidez. Lamentablemente en este caso no se dispone de una fórmula para el factor de corrección.
5 CODOS CON Y SIN PRESIÓN INTERIOR Mediante un razonamiento completamente análogo al anterior se puede demostrar que los codos solicitados en flexión se “ovalizan” y disminuyen notablemente su rigidez, cualquiera sea el sentido del momento flector actuante. La sección ovalizada de la Figura 10-a induce a pensar que el aumento del momento de inercia alrededor del eje x debido a la ovalización podría rigidizar la sección y disminuir las tensiones máximas. Esto no ocurre ya que, según se comentó en la sección anterior, este efecto es despreciable. En cambio, la variación de εθ debido a la curvatura es muy significativa.
Figura 10: Ovalización de un codo flexionado
161
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
El primer estudio de ovalización se debe a Von Kármán y data del año 1911. En esta sección se enuncia sucintamente la metodología a usar. Todo se resume a disminuir la rigidez y aumentar la tensión máxima calculada con la fórmula para vigas rectas en flexión utilizando coeficientes que tienen en cuenta el efecto de la curvatura y la presión interior.
(29) Figura 11: Geometría de un codo y cargas actuantes
5.1 Codos sin presión interior En la Figura 11 se indica el radio medio del caño rm ( hasta la mitad del espesor ), el radio del codo R y el espesor del caño t. La rigidez flexional del codo (EI ) o es menor que la rigidez nominal (EI ) nom correspondiente a una viga recta:
= Io Ω = donde: I nom π rm3 t o I nom
(30)
donde Ωo es el factor de disminución de rigidez flexional por ovalización de la viga curva dado en (33). La tensión máxima para verificación σ o se encontró como la combinación más desfavorable de tensiones membranales (longitudinales y circunferenciales), tensiones flexionales (longitudinales y circunferenciales) debidas a la ovalización y tensiones de corte por torsión,
= σ o η= donde: σ nom o σ nom
M rext I nom
(31)
donde ηo es el factor de incremento de tensión por la ovalización de la viga curva y M es el momento resultante dado en (29) que está indicado en la Figura 11 y corresponde al criterio de Tresca. Para determinar los factores Ωo y ηo debidos a la ovalización se definen previamente dos factores adimensionales λ y γ:
= λ
Rt = γ rm2 1 − ν 2
Luego = Ωo 0,6 λ
restringido a
= ηo λ − 0,667 (1 + 0, 25 /γ )
R rm
(32)
λ≤1 restringido a
(33)
0,05 ≤ λ ≤ 1
(34)
5.2 Codos con presión interior Por efecto de la presión interior ‘p’ aparecen tensiones membranales que tienden a devolver la forma circular al codo ovalizado y esto modifica los valores asociados a la ovalización: cuando: 0,05 ≤ λ ≤ 1 y 0 ≤ ψ ≤ 0,1
donde:
Ω = 1+1,75 λ −1,333 e −1,15 ψ
σ = 1+λ −1,333 e − ψ
I = (Ω I ) Ω o nom p σ p = (ηo σ nom ) / σ
(35) (36)
− 0,25
(37)
− 0,25
(38)
siendo ψ un parámetro adimensional proporcional a la presión:
162
ψ =
p R2 E rm t
(39)
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
6 CÁLCULO DE DESPLAZAMIENTOS EN UNA VIGA CURVA 6.1 Energía de deformación en un tramo de viga curva A los efectos del cálculo de desplazamientos es necesario plantear correctamente la energía de deformación para el elemento infinitesimal de viga curva correspondiente a dθ, bajo la acción simultánea de M z, Q y N de acuerdo a la Figura 2.
W =
∫
Am (M z ) 2 Mz N Q2 N2 R dθ + ∫ R dθ + ∫ dθ − ∫ dθ 2 Ac G 2 AE 2 AE ( RAm − A) AE
(40)
El primer término es energía por corte, el segundo es energía por solicitación axial, el tercero corresponde a la flexión y el cuarto se debe al acoplamiento entre M z y N. Ese último término se explica porque al girar la sección alrededor del eje neutro produce un desplazamiento del eje baricéntrico donde actúa N. Debe tenerse cuidado al asignar los signos de M z y N en el término de acoplamiento: N es positivo si es de tracción y M z es positivo si trata de disminuir la curvatura de la viga. Para secciones té y dobleté debe considerarse la sección reducida por el efecto Bleich según (23) y en el caso de codos debe utilizarse el momento de inercia reducido según (30) y (33).
6.2 Desplazamiento de un punto de una viga curva Para calcular la componente del desplazamiento de un punto de una viga curva en una dirección dada se puede aplicar el teorema de Castigliano. Para ello: i ) se aplica un fuerza ficticia “X ” en el punto donde se quiere calcular el desplazamiento y en la dirección deseada, ii ) se determinan los esfuerzos N, Q y M z causados por todas las fuerzas aplicadas (incluyendo la fuerza ficticia X ) , iii ) se computa la energía de deformación W(X) usando la ecuación (40), iv) se calcula la derivada de la energía de deformación respecto de X:
u( X ) =
∂W( X )
(41)
∂X
y finalmente v ) se reemplaza en u(X) a la fuerza ficticia por su verdadero valor: X = 0. Resulta obvio que cuando se quiere conocer la componente del desplazamiento de un punto donde esta aplicada una carga P, dato del problema y en la dirección de la carga P, no hace falta utilizar la carga ficticia. Basta reemplazar X por P en la ecuación (41). Nota importante: Los desplazamientos están menos influenciados por la curvatura de la viga que las tensiones circunferenciales σθ. Por ello para valores R/h > 3 se pueden reemplazar el 3er y 4to término del segundo miembro de (40) por el término habitual que corresponde a la flexión de vigas rectas dado en (42):
∫
M z2 R dθ 2 EI
(42)
simplificando notablemente los cálculos y cometiendo un error menor al 2 %. Adicionalmente los cálculos se pueden realizar de una manera más eficiente derivando según (41) previo a realizar la integración (42) :
= u( X )
∂W( X ) = ∂X
∂ ∂X
∫
(M z ( X ) )2 = R dθ 2 EI
∫
M z (X ) ∂ M z (X ) ∂X EI
R dθ
(43)
X =0
ya que si en algún tramo de la integral se anula alguno de los términos dentro del corchete la integral en ese tramo no se realiza porque resulta nula. En los casos donde predomina la flexión puede ignorarse la contribución del esfuerzo axial N y del corte Q y si además R/h > 3 todo el cálculo queda reducido a lo indicado en (43).
163
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
PRÁCTICO
Vigas curvas
Nota: Todos los datos están dados en unidades [cm] y [kg]
1 Determinar el coeficiente de seguridad del gancho del croquis para una carga máxima de 6000 kg. Comparar el resultado obtenido con la teoría de viga curva con el correspondiente a viga recta. Material: acero σf = 2800 kg/cm2
2 Calcular el desplazamiento vertical del punto A debido a la carga F que produce fluencia. Aro con un radio medio de 4 cm. Material: acero σf = 2800 kg/cm2 Comparar resultados considerando viga curva y viga recta.
3 Determinar el coeficiente de seguridad de la prensa del croquis para una carga máxima de 1200 kg. Material: acero σf = 3420 kg/cm2 Ayuda: Emplear corrección de Bleich y calcular la tensión circunferencial en el punto A.
4 Un codo de 90º sin presión interior empotrado en el extremo A tiene una carga perpendicular a su plano en el extremo libre B. Espesor: t = 0,2 cm
Material: acero σf = 4000 kg/cm2
Se pide: a) Calcular la máxima carga isible con CS = 2 b) Repetir el cálculo ignorando la ovalización del codo (usando teoría de viga recta). c) Comparar los resultados obtenidos.
5 Para calcular la matriz de rigidez de un codo se comienza calculando la matriz de flexibilidad para un extremo libre considerando el otro extremo como empotrado.
F11 F 21 F31
F12 F22 F32
F13 P1 u1 F23 P2 = u2 F33 M φ
Material: acero E = 2100000 kg/cm2 ν = 0,3 Calcular F31 empleando el teorema de Castigliano. a) Codo sin presión interior. b) Codo con presión interior p = 40 kg/cm2 Ayuda: Considerar teoría de vigas rectas teniendo en cuenta la pérdida de rigidez por ovalización a través de Io dado por la ecuación (30).
164
R = 12
rm = 4
t = 0,2
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
SOLUCIÓN del PRÁCTICO
Vigas curvas
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
Nota: Todos los resultados parciales y finales se dan unidades [cm] y [kg]
1 Cálculo del coeficiente de seguridad de un gancho para una carga de 6000 kg. 1.a Solución exacta como viga curva Propiedades: Tabla 2 caso 3...... = A 12 x (8 + 2 )/2 ................................ A = 60
[6 x ( 2 x 8 + 2) + 1 x8(8 + 2 x 2 )] / [3 x (8 + 2 )] ................................ R = 10,8 = Am ( 8 x 18 − 2 x 6 ) x ln (18 /6) / 12 − 8 + 2 .............................. Am = 6,0847352
= R
1 6,0847352 6000 6000 x 10,8 = + − ....... σ θ = 839,9 60 10,8 x 6,0847352 − 60 6 60 = CS σ= 2800 / = 839,9 3,33 ................................................ CS = 3,33 f /σ θ Ec. (14) → σ θ
1.b Solución aproximada con viga recta h= 12 ; b1= 8 ; b2 =2 ; I = h3 ( b12 + 4 b1 b2 + b22 ) / [36 ( b1 + b2 )]= 633,6 ; M 6000 = = x 10,8 64800 6000 64800 6000 64800 σ máx = 636, 4 σA = + + 590,9 σ B = − − 636, 4 (10,8 − 6) = (18 − 10,8) = 60 633, 6 60 633, 6 = CS σ= 2800 /636, 4 ............................................................................................. Cs = 4, 40 f /σ máx La tensión máxima como viga recta es 24 % menor, tiene signo opuesto y ocurre en un punto distinto.
2 Determinación del desplazamiento vertical del punto A causado por la carga que produce fluencia. 2.a Carga que produce fluencia Propiedades: Tabla 2 caso 4.....b = 0,5 →= A π= b 2 π x (0,5) 2 .......... A = 0,7854 R = 4................................................................................................................ R = 4 Am = 2 π ( R − R 2 − b 2 )= 2 π ( 4 − 42 − (0,5) 2 ) ................... Am = 0,1971226 1 0,1971226 −F −F x 4 = + − ... σ θ = − 46, 23 F 0,7854 4 x 0,1971226 − 0,7854 3,5 0,7854 = σ θ σ= 46, 23 F ; = σ f 2800 ; σ= σf ⇒ F = 60,57 kg máx máx Ec. (14) →
σθ
r = 3,5
Se puede verificar que la fórmula para vigas rectas predice F = 66,64 kg, con un error del 10 %. 2.b Cálculo del desplazamiento del punto A
− F ( R sen θ ) Q == F cos θ ; N − F sen θ ; M z =
Esfuerzos:
W =∫
Ec. (40) →
E ∂W = 0,385 E= ; Ac 0,85= A; 2(1 + ν ) ∂F
= G
∫
π
0
( F cos θ ) 2 (− F sen θ )2 R dθ + ∫ R dθ + 2 Ac G 2 AE Am (− F R sen θ ) 2 (− F R sen θ ) (− F sen θ ) dθ ∫ 2 AE ( RAm − A) dθ − ∫ AE
sen 2θ = dθ
= uF
∂W = ∂F
∫
π
0
cos 2θ = dθ
π 2
∂W = ∂F
;
π x 60,57 x 4 2 x 2100000 x 0,7854
π F R cos 2 θ + sen 2 θ + 255 sen 2 θ − 2 sen 2 θ dθ ∫ E A 0 0,85 x 0,385
πFR 2E A
[
+ 3,05 corte
x
= ( 257,05 )
+
1
normal
+ 255 −
2
]
flexión acople
0,0593 ....................................... u F = 0,0593 cm
Es importante destacar que usando la teoría de viga recta con una carga P = 60,57 kg se obtiene un desplazamiento uF = 0,060 cm con un error de apenas el 1,2 %. Esto confirma que el efecto de viga curva en los desplazamientos es mucho menor que en las tensiones. 165
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
3 Cálculo del coeficiente de seguridad de una prensa para carga máxima de 1200 kg. 3.a Corrección de las alas usando la corrección de Bleich, ecuación (23)
α = 0,9961 β = 0, 2421 Ec. (23) = → b1′ 2 (α1 = 2 x ( 0,9961 x 0,7 ) + 1, 2 ........................ b1′ = 2,5945 1) + t [3x (1 − 0,32 ) /( 7, 22 x 0,82 )] 0,25 = 0,535586 λ = Ec. (26) → Ec. (25) → = λ 2 x 0,535586 x = 0,7 0,749821 z 2=
α = 0,9381 = λ 2 x 0,637937 x= 1, 2 1,5310 z 2= β = 0,9244 Ec. (23)= → b2′ 2 (α 2 = 2 x ( 0,9381 x 1, 2 ) + 1, 2 ...................... b2′ = 3, 4514 2)+t λ = [3x (1 − 0,32 )/(2,92 x1, 42 )] 0,25 = 0,637937
Ec. (26) →
Ec. (25) →
3.b Cálculo del área A, del área modificada Am y del radio R de la sección reducida = A1 2,5945 = x 0,8 2,0756
= A2 1,= 2 x 3, 2 3,84
6,8 = Am 2 1,= 2 x ln 0,763186 3,6 R2 = 5, 2 ( 3,6 + 6,8) / 2 =
7,6 = Am1 2,5945 = x ln 0, 288575 6,8 R1 = 7, 2 ( 6,8 + 7,6 ) / 2 =
Propiedades de la sección compuesta A = A1 + A2 + A3 = 10,7476
= A3 3,= 4514 x 1, 4 4,8320
3,6 = Am 3 3,= 4514 x ln 1,699733 2, 2 R3 = 2,9 ( 2, 2 + 3,6 ) / 2 =
Am = Am1 + Am 2 + Am 3 = 2,751494 R = ( A1 R1 + A2 R2 + A3 R3 ) / A = 4,55219
3.c Cálculo de las tensiones variables en el espesor Esfuerzos:... N = 1200 kg= M 1200 x ( 7,3 + 4,55219) ......... M = 14222,63 kg -cm 8000, 4 1 2, 75149 1200 14222, 63 −1936,5 + = + − .. σ θ = r 10, 7476 4,5522 x 2, 751494 − 10, 7476 r 10, 7476 Tensión transversal: Ec. (24) → σ z = − β σ θ Punto 1: σ z1 = − 0,9244 x σ θ r =2,9 = − 760 Ec. (14) →.. σ θ
Punto 7: Punto r
σθ σz σ*
r
Tensión de von Mises σ *= − 0, 2421 x σ θ r =7,2 = σ z7 = 200 1 2,2 1700 – 760 2181
Ala superior 2 2,9 822 0 822
3 3,6–ε 286 760 665
4 3,6+ε 286 0 286
Alma 5 4,132 0 0 0
6 6,8–ε – 760 0 760
7 6,8+ε – 760 200 878
σ θ2 + σ z2 − σ θ σ z Ala inferior 8 9 7,2 7,6 – 826 – 884 0 – 200 826 803
3.d Gráfico de las tensiones
3.e Determinación del coeficiente de seguridad = CS σ= 3420= /2181 1,57 .................................................................................. f /σ θ
166
CS = 1,57
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
4 Determinación de la carga isible aplicable en un extremo de un codo sin presión. 4.a Cálculo teniendo en cuenta la ovalización de la viga curva Propiedades geométricas del codo: R =(14,6 + 9, 4) / 2 =12 ....................................................... R = 12 rm= (14,6 − 9, 4 − 0, 2) / 2= 2,5 ........................................ rm = 2,5
t = 0,2 .................................................................................. t = 0, 2 Momento de inercia nominal (como viga recta): Ec. (30) →= I nom π= rm3 t π x (2,5)3 x 0, 2 ..................... I nom = 9,8175 Momento resultante M para usar en el codo: Ec.= (29) → M
(12 P ) 2 + (12 P ) 2 .......................... M = 16,97 P
Relaciones geométrica adimensionales de la viga curva: Ec. (32) → ... γ R= = / rm 12= / 2,5 4,8 .......................................................................... γ = 4,8
= λ Ec. (32) →
2 1 −ν = ) 12 x 0, 2 / (2,52
R t / (rm2
1 − 0,32
) .......................
λ = 0, 4025
Incremento de tensiones por efecto de ovalización: Ec. (34) → 0,05 ≤ λ ≤ 1
→= ηo λ − 0,667 (1 + 0, 25= / γ ) 0, 4025 − 0,667 (1 + 0, 25 / 4,8) ..... ηo = 1,93
Tensión máxima considerando ovalización: M 16,97 x P x 2,6 ................................ σ o = 8,674 P ηo = rext 1,93 x Ec. (31)= → σ o η= o σ nom I nom 9,8175 Determinación de la carga isible:
σo = σ f / CS
⇒
8,674 P = 4000 / 2 …………….……….…..….….. P = 230,6 kg
Notar que se ha considerado que el empotramiento no impide la ovalización. 4.b Cálculo ignorando la ovalización (teoría de viga recta) Momento de inercia como viga de pared delgada Ec. (30)= → I rm3 t π x (2,5)3 x 0, 2 ...................................................................... I = 9,8175 π= Módulo de torsión (JR del tubo circular de pared delgada ) = J R 2= π (rm )3 t 2 x π x (2,5)3 x 0, 2 .................................................................... J R = 19,635 Tensión normal por flexión en el extremo A: 12 x P M x 2,6 ................................. σ = 3,178 P σ = = rext 9,8175 I Tensión de corte por torsión en el extremo A: T 12 x P x 2,6 .................................. τ = 1,589 P = τ = rext JR 19,635 Tensión efectiva de von Mises
σ* =
σ 2 + 3τ 2 =
(3,178 P ) 2 + 3 x (1,589 P ) 2 ............................................. σ * = 4, 204 P
Carga isible con coeficiente de seguridad igual a 2:
σ* = σ f / CS
⇒
4, 204 P = 4000 /2 ………..……→…....…….….. P = 475,7 kg
4.c Comparación de los resultados En este caso al comparar los resultados 4.a y 4.b, se observa que debido al efecto de viga curva se pierde más del 50 % de la resistencia debido a la ovalización !!!!!!
167
Compendio de Cálculo Estructural II – FCEFyN – UNC
J.Massa-J.Giro-A.Giudici - 2015
5 Cálculo de un elemento de la matriz de flexibilidad de un codo como viga curva. El elemento F31 de la matriz de flexibilidad es igual al giro φ en radianes producido por una carga unitaria horizontal de valor unitario: P1 = 1 kg. Para resolver empleando el teorema de Castigliano se coloca un momento ficticio M o en el extremo libre que se anula después de derivar.
Q = 1 sen θ Esfuerzos: N = 1 cos θ M =M o − R (1 − cos θ )
R = 12
rm = 4
t = 0,2
Área de la sección plana de pared delgada: = x π x rm x t 2 x π x 4 x 0, 2 .................... A = 5,03 A 2= Relación geométrica adimensional λ de la viga curva:
= λ Ec. (32) →
1 − ν 2= ) 12 x 0, 2 / (42
R t / (rm2
1 −ν 2
) .......................................
λ = 0,15724
Disminución de la rigidez Ωo : Ec. (33) →
λ < 1 → Ω= 0,6 x= λ 0,6 x 0,15724 .................................................... Ωo =0,09434 o
Comentario : como la curvatura es elevada [R/(2rm ) = 1,5] y el espesor es pequeño ( t << rm ) el efecto perjudicial de la ovalización es muy importante y la flexibilidad aumenta más del 1000 % !!! Momento de inercia nominal I nom y reducido I o : Ec. (30) →
= I nom π= rm3 t π x 43 x 0, 2 ............................................................................. I nom = 40, 21
= Ec. (30) → Io
Ω = 0,09434 x 40, 21 ..................................................................... I o = 3,794 o I nom
5.a Flexibilidad del codo sin presión interior Energía de deformación elástica:
[ M o − R (1 − cos θ )] R dθ − [ M o − R (1 − cos θ )] cos θ dθ sen 2 θ cos 2 θ W =∫ R dθ + ∫ R dθ + ∫ ∫ 2 Ac G 2 AE 2E Io AE 2
Ec. (40) y (42) →
Derivada de la energía de deformación respecto al momento ficticio: ∂W = 0 + 0 + ∂M o
∂W F31o = ∂M o M
o
π /2
∫ 0
π /2 M o − R (1 − cos θ ) cos θ R dθ − ∫ dθ E Io AE 0
R2 θ − sen θ = − E Io =0
π /2 0
−
1 sen θ EA
π /2 0
(−1,0276 − 0,0095) x10−5 =
F31o = − 1,04 x10−5 rad / kg
5.b Flexibilidad del codo con presión interior El único cambio respecto al caso 5.a es el incremento de la rigidez por el efecto estabilizante de la presión interior aplicada al codo. Esto se traduce en un incremento del momento de inercia reducido lo que disminuye de manera inversamente proporcional la deformación por flexión. Parámetro adimensional de presión ψ : Ec. (39) → ψ = p= R 2 / ( E rm t ) 40 x 122 /(2100000 x 4 x 0, 2 ) ..................................... ψ = 0,003429 Incremento de rigidez Ω : Ec. (35) →
Ω
− 0,25
−1,333 −1,15 x 0,003429 = x (0,15724) xe 1+1,75 1,178 → I p = Ω I o ←
Ω = 1,178
La rigidez del codo aumenta un 18 % debido a la presión interior que es estabilizante, en consecuencia: p −5 F31p = (−1,0276 / Ω − 0,01) x 10−5 = (−1,0276 /1,178 − 0,0095) x 10−5 .... F31 = − 0,882 x10 rad / kg
168
Related Documents c2h70

Vigas Curvas 3c725
October 2019 38
Vigas Curvas 3c725
December 2019 38
Vigas Curvas(1) 4w332g
August 2020 0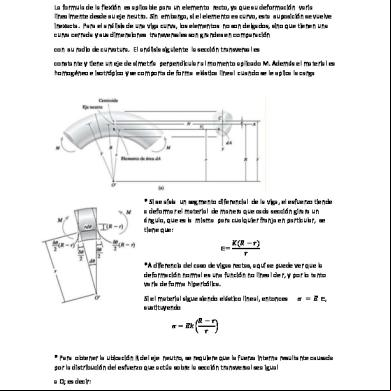
Vigas Curvas Ejemplos 3i5m47
December 2022 0
Estudio Estructural De Vigas Curvas 602o4m
June 2021 0
Vigas 2m6k3y
December 2020 0More Documents from "Elvis Diaz" 6p5y3b

Procesos De Soldadura(smaw-gtaw-gmaw-saw) 1d4z6y
July 2020 0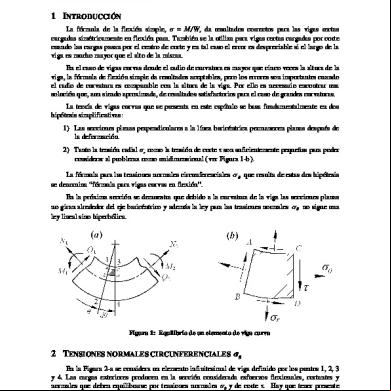
6g3p1u
August 2020 0
Calculo-tanque-api-650-2016 4t3z6w
April 2020 30
Gametogenesis Animal 4m5wt
February 2021 0
Ejecucion De Obra 5m5r3w
August 2020 0