Mechanical Vibration Lab Report 2ua61
This document was ed by and they confirmed that they have the permission to share it. If you are author or own the copyright of this book, please report to us by using this report form. Report 2z6p3t
Overview 5o1f4z
& View Mechanical Vibration Lab Report as PDF for free.
More details 6z3438
- Words: 1,738
- Pages: 7
School of Engineering University of California, Merced ME140 Vibration and Control Experiment No. One
Estimation of m-c-k Coefficients of SDOF Oscillators Objectives 1. Learn how to determine the spring constant and the viscous damping coefficient of SDOF spring-mass-damper oscillators. 2. Gain hands-on experience of experiments and data acquisition system. 3. Learn how to use Matlab for post-processing experimental data. Background An understanding of simple harmonic motion is fundamental to an engineer performing vibration analysis. Simple harmonic oscillator has three elements: an inertial element, a damping element and a stiffness element. The experimental setup consists of a mass attached to a spring and a damper that is oscillating horizontally on a tabletop. The restoring force of the spring on the mass is proportional to the displacement from the equilibrium point where the mass is at rest. The damper force is proportional to the relative velocity across the damper. This damper can be made of a real dashpot, or can be viewed as a model of all the damping effect due to friction, air and the energy loss in the spring.
Figure 1. The physical model of the experiment.
We can define the undamped natural frequency ωn of the system as follows: -1-
k . m
ωn =
Applying Newton’s second law to the system shown in Figure 1, we yield, m x + cx + kx = 0 .
(1)
The general solution of the equation is: 2 2 ⎧⎪ c ⎫ ⎧⎪ c ⎫ ⎛ c ⎞ k ⎪ ⎛ c ⎞ k ⎪ x(t ) = C1 exp ⎨− + ⎜ − t + C exp − − − ⎬ ⎨ ⎬ t 2 ⎟ ⎜ ⎟ 2 m 2 m m 2 m 2 m m ⎝ ⎠ ⎝ ⎠ ⎪⎩ ⎪⎭ ⎪⎩ ⎪⎭
(2)
2
⎛ c ⎞ k We define the critical damping constant cc such that ⎜ c ⎟ − = 0 . From this condition, we ⎝ 2m ⎠ m have cc = 2mωn . Conceptually, cc is the lowest value of c for which the system’s free response to initial conditions will not be oscillatory. The damping ratio ζ is defined as ζ =
c . Equation cc
(2) can be rewritten as:
{
}
{
}
x(t) = C1 exp −ζ + ζ 2 − 1 ω nt + C2 exp −ζ − ζ 2 − 1 ω nt
(3)
System classification Vibrational systems are often classified according to the value of ζ in the following manner:
ζ <1: Underdamped System (oscillatory response) ζ =1: Critically Damped System (non-oscillatory response) ζ >1: Overdamped System (non-oscillatory response) The spring-mass-damper system we use in this lab falls in the underdamped category, which means that ζ 2 − 1 < 0 , and hence x(t) will be oscillatory. A real valued solution of x(t) in the underdamped case is:
(
/
)
/
x(t ) = exp {−ζωnt}* C1 cos 1 − ζ 2 ωnt + C2 sin 1 − ζ 2 ωnt , or
(
)
(
)
x(t) = X 0 exp −ζω nt * cos ω d t − φ0 ,
-2-
(4)
(5)
(
/
where C1 , C2
/
) and ( X , φ ) are arbitrary constants to be determined from the initial 0
0
conditions. The damped natural frequency ωd of the system is defined as:
ωd = ωn 1 − ζ 2
(6)
Logarithmic Decrement The logarithmic decrement δ represents the rate at which the amplitude of a free damped vibration decreases. If we choose two times such that t2 = t1 + τd where τd is the period of the damped oscillator, then
exp ( −ζωnt1 ) x1 X 0 exp(−ζωnt1 )*cos(ωd t1 − φ0 ) = = = exp ( ζωn τd ) . x2 X 0 exp(−ζωnt2 )*cos(ωd t2 − φ0 ) exp ( −ζωn (t1 + τd ))
(7)
We are now ready to define δ :
⎛ x ⎞ c δ = ln ⎜ 1 ⎟ = ζωn τd = τd . 2m ⎝ x2 ⎠
(8)
At this point we have defined all relevant system variables, and it is important to note that each of these variables ( ζ, ωn , ωd , δ, τd ) can be readily calculated if we know m, c, and k. In this lab, however, m, c, and k are all unknown. The objective of the experiment is to measure
(ζ, ωn , ωd , δ, τd ) experimentally so as to calculate m, c, and k. Estimate of Mass The experiment yields a set of ( ζ, ωn , ωd , δ, τd ) values, which ultimately give us two ratios: c/m and k/m. Our goal is to determine m, c, and k. Obviously we need another equation. It should be pointed out that the overall system mass includes the unknown masses of the cart, armature and other motor components contributing to the inertia. We can obtain the mass mc of cart, armature, and other motor components by comparing the k/m ratios for experiments with different added masses as follows:
-3-
( k / (m
k / mc + mwA c
B w
+m
)=C ) C
A
,
(9)
B
where the added weights mwA and mwB are known, and CA and CB are the experimentally determined k/m ratios for trials A and B, respectively. From Equation (9), one can readily calculate mc.
Procedure In the experiment, we will displace an underdamped spring-loaded cart with an added and known mass by a certain distance, and then record the oscillatory response position of the cart after it is released. There will be six trials altogether, according to the following chart: Trial #
1
2
3
4
5
6
Added Mass (kg)
0.1
0.1
0.1
.5
.5
.5
1 cm
2 cm
3 cm
1 cm
2 cm
3 cm
Initial Displacement
Note: The weight of the added mass may be different, but will be known. Each trial will proceed as follows: 1. Open E Executive software from the desktop icon. Go to \
and click <step>. Click <setup>. Choose open loop, and set step size=0, dwell time=3000 ms, Number of Reps=1. Click
and close window. 2. Go to
\ <Execute> and choose normal data sampling. On the physical setup, one group member displaces cart 1 the appropriate distance. Click
and release the cart approximately 1 second later. 3. Go to
\ <Setup Plot>. Choose ‘encoder 1 position’ only in the left axis box, then click
. The plot will show the damped oscillations of the cart. The plot is intended to give you a qualitative feel for how the system responds, the actual data processing will be done with Matlab. 4. Go to
\ <Export raw data>. Pick an appropriate file name, and export the data to a folder on your own storage. Close the E software after all trials are done. -4-
5. Find a computer with Matlab installed. Save the sample file “damping.m” in a folder with your data on the computer. Open Matlab sample file and follow instructions as indicated in the program. Action Items 1. Calculate an estimate of the mass of the empty cart and armature (mc) using the method listed in the background section. You should obtain three mc values by using the following ratios:
Trial _ 4 Trial _ 5 Trial _ 6 . Report the average of these three values as your experimental , , Trial _1 Trial _ 2 Trial _ 3 mc value. 2. Create a data table which includes ( ζ, ωn , ωd , δ, τd , k , c, m ) for all 6 trials. The mass here is the overall system mass for that particular trial: m = mc + mw . 3. Briefly discuss any sources of error, and how they affect your final results. 4. Write a paragraph of constructive criticism for the lab manual and the performance of the TA. All suggestions are welcomed and appreciated.
-5-
Sample Matlab Code The input to the program “damping.m” is the raw data file, and the output is a set of the first 4 peak values from your data. Add your own code to the bottom of the program so that the output also includes values for ( ζ, ωn , ωd , δ, τd , m, c, k ) for each trial. Please include your code and one sample output in your report. % Matlab sample program damping.m for computing damping coefficient % of a single degree of freedom oscillator % % Input: % Your data file as the output of the E software % The weight of the mass % % Output: % Damping coefficient c of the oscillator % Stiffness constant of the oscillator % % Copy right 2010 Your name, UC Merced clear close all mass=1; % a default mass value %mass=input(' Input the weight of the mass : ') %filename=input(' Type your file name : ','s') filename=['step.txt']; fid=fopen(filename);
% 's' requires you to type a string as the file name
nouse=fgetl(fid); n=1; datmat=[]; while 1, a= fgetl(fid); if n == 1, na=length(a), end; if ~isstr(a), break; end; n=n+1; anum=eval(['[',a(2:na-1),']']); datmat=[datmat;anum]; end [N,M]=size(datmat)
% Initialize an empty string % Read one line of data in at a time in the format of a STRING % If a is no longer a string, stop reading % datmat is the data matrix % Dimensions of the matrix
% % % % % % % %
Descriptions of the columns: M=1, the sample index, sample index starts from 0 M=2, the real time in seconds M=3, the excitation signal the force conversion factor to physical units = ?? M=4-6, the readings from encoders 1-3 the encoder conversion factor to physical units = ??
%
Algorithm for identifying the peaks of the motion
m=4;
% Look at the first encoder
for n=1:N, if datmat(n,m) ~= 0, firstsign=sign(datmat(n,m)); ns=n; break;
-6-
end end peak=[]; neak=[]; numk=4;
% The variable to hold the peak values % The corresponding index of the peak value % Number of peaks to look for
for npk=1:numk, for n=ns+1:N, nsign=sign(datmat(n,m)); if nsign ~= firstsign, ns2=n; break; end end [ak,nk]=max(abs(datmat(ns:ns2,m))) peak=[peak,ak*firstsign]; neak=[neak,ns+nk-1]; ns=ns2; firstsign=nsign;
% ak is the peak value in the range ns:ns2, nk is its index
% Get ready for next peak search
if ns >= N-1, break; end; end plot(datmat(:,1),datmat(:,m)) hold on plot(neak-1,peak,'x')
-7-
Estimation of m-c-k Coefficients of SDOF Oscillators Objectives 1. Learn how to determine the spring constant and the viscous damping coefficient of SDOF spring-mass-damper oscillators. 2. Gain hands-on experience of experiments and data acquisition system. 3. Learn how to use Matlab for post-processing experimental data. Background An understanding of simple harmonic motion is fundamental to an engineer performing vibration analysis. Simple harmonic oscillator has three elements: an inertial element, a damping element and a stiffness element. The experimental setup consists of a mass attached to a spring and a damper that is oscillating horizontally on a tabletop. The restoring force of the spring on the mass is proportional to the displacement from the equilibrium point where the mass is at rest. The damper force is proportional to the relative velocity across the damper. This damper can be made of a real dashpot, or can be viewed as a model of all the damping effect due to friction, air and the energy loss in the spring.
Figure 1. The physical model of the experiment.
We can define the undamped natural frequency ωn of the system as follows: -1-
k . m
ωn =
Applying Newton’s second law to the system shown in Figure 1, we yield, m x + cx + kx = 0 .
(1)
The general solution of the equation is: 2 2 ⎧⎪ c ⎫ ⎧⎪ c ⎫ ⎛ c ⎞ k ⎪ ⎛ c ⎞ k ⎪ x(t ) = C1 exp ⎨− + ⎜ − t + C exp − − − ⎬ ⎨ ⎬ t 2 ⎟ ⎜ ⎟ 2 m 2 m m 2 m 2 m m ⎝ ⎠ ⎝ ⎠ ⎪⎩ ⎪⎭ ⎪⎩ ⎪⎭
(2)
2
⎛ c ⎞ k We define the critical damping constant cc such that ⎜ c ⎟ − = 0 . From this condition, we ⎝ 2m ⎠ m have cc = 2mωn . Conceptually, cc is the lowest value of c for which the system’s free response to initial conditions will not be oscillatory. The damping ratio ζ is defined as ζ =
c . Equation cc
(2) can be rewritten as:
{
}
{
}
x(t) = C1 exp −ζ + ζ 2 − 1 ω nt + C2 exp −ζ − ζ 2 − 1 ω nt
(3)
System classification Vibrational systems are often classified according to the value of ζ in the following manner:
ζ <1: Underdamped System (oscillatory response) ζ =1: Critically Damped System (non-oscillatory response) ζ >1: Overdamped System (non-oscillatory response) The spring-mass-damper system we use in this lab falls in the underdamped category, which means that ζ 2 − 1 < 0 , and hence x(t) will be oscillatory. A real valued solution of x(t) in the underdamped case is:
(
/
)
/
x(t ) = exp {−ζωnt}* C1 cos 1 − ζ 2 ωnt + C2 sin 1 − ζ 2 ωnt , or
(
)
(
)
x(t) = X 0 exp −ζω nt * cos ω d t − φ0 ,
-2-
(4)
(5)
(
/
where C1 , C2
/
) and ( X , φ ) are arbitrary constants to be determined from the initial 0
0
conditions. The damped natural frequency ωd of the system is defined as:
ωd = ωn 1 − ζ 2
(6)
Logarithmic Decrement The logarithmic decrement δ represents the rate at which the amplitude of a free damped vibration decreases. If we choose two times such that t2 = t1 + τd where τd is the period of the damped oscillator, then
exp ( −ζωnt1 ) x1 X 0 exp(−ζωnt1 )*cos(ωd t1 − φ0 ) = = = exp ( ζωn τd ) . x2 X 0 exp(−ζωnt2 )*cos(ωd t2 − φ0 ) exp ( −ζωn (t1 + τd ))
(7)
We are now ready to define δ :
⎛ x ⎞ c δ = ln ⎜ 1 ⎟ = ζωn τd = τd . 2m ⎝ x2 ⎠
(8)
At this point we have defined all relevant system variables, and it is important to note that each of these variables ( ζ, ωn , ωd , δ, τd ) can be readily calculated if we know m, c, and k. In this lab, however, m, c, and k are all unknown. The objective of the experiment is to measure
(ζ, ωn , ωd , δ, τd ) experimentally so as to calculate m, c, and k. Estimate of Mass The experiment yields a set of ( ζ, ωn , ωd , δ, τd ) values, which ultimately give us two ratios: c/m and k/m. Our goal is to determine m, c, and k. Obviously we need another equation. It should be pointed out that the overall system mass includes the unknown masses of the cart, armature and other motor components contributing to the inertia. We can obtain the mass mc of cart, armature, and other motor components by comparing the k/m ratios for experiments with different added masses as follows:
-3-
( k / (m
k / mc + mwA c
B w
+m
)=C ) C
A
,
(9)
B
where the added weights mwA and mwB are known, and CA and CB are the experimentally determined k/m ratios for trials A and B, respectively. From Equation (9), one can readily calculate mc.
Procedure In the experiment, we will displace an underdamped spring-loaded cart with an added and known mass by a certain distance, and then record the oscillatory response position of the cart after it is released. There will be six trials altogether, according to the following chart: Trial #
1
2
3
4
5
6
Added Mass (kg)
0.1
0.1
0.1
.5
.5
.5
1 cm
2 cm
3 cm
1 cm
2 cm
3 cm
Initial Displacement
Note: The weight of the added mass may be different, but will be known. Each trial will proceed as follows: 1. Open E Executive software from the desktop icon. Go to
5. Find a computer with Matlab installed. Save the sample file “damping.m” in a folder with your data on the computer. Open Matlab sample file and follow instructions as indicated in the program. Action Items 1. Calculate an estimate of the mass of the empty cart and armature (mc) using the method listed in the background section. You should obtain three mc values by using the following ratios:
Trial _ 4 Trial _ 5 Trial _ 6 . Report the average of these three values as your experimental , , Trial _1 Trial _ 2 Trial _ 3 mc value. 2. Create a data table which includes ( ζ, ωn , ωd , δ, τd , k , c, m ) for all 6 trials. The mass here is the overall system mass for that particular trial: m = mc + mw . 3. Briefly discuss any sources of error, and how they affect your final results. 4. Write a paragraph of constructive criticism for the lab manual and the performance of the TA. All suggestions are welcomed and appreciated.
-5-
Sample Matlab Code The input to the program “damping.m” is the raw data file, and the output is a set of the first 4 peak values from your data. Add your own code to the bottom of the program so that the output also includes values for ( ζ, ωn , ωd , δ, τd , m, c, k ) for each trial. Please include your code and one sample output in your report. % Matlab sample program damping.m for computing damping coefficient % of a single degree of freedom oscillator % % Input: % Your data file as the output of the E software % The weight of the mass % % Output: % Damping coefficient c of the oscillator % Stiffness constant of the oscillator % % Copy right 2010 Your name, UC Merced clear close all mass=1; % a default mass value %mass=input(' Input the weight of the mass : ') %filename=input(' Type your file name : ','s') filename=['step.txt']; fid=fopen(filename);
% 's' requires you to type a string as the file name
nouse=fgetl(fid); n=1; datmat=[]; while 1, a= fgetl(fid); if n == 1, na=length(a), end; if ~isstr(a), break; end; n=n+1; anum=eval(['[',a(2:na-1),']']); datmat=[datmat;anum]; end [N,M]=size(datmat)
% Initialize an empty string % Read one line of data in at a time in the format of a STRING % If a is no longer a string, stop reading % datmat is the data matrix % Dimensions of the matrix
% % % % % % % %
Descriptions of the columns: M=1, the sample index, sample index starts from 0 M=2, the real time in seconds M=3, the excitation signal the force conversion factor to physical units = ?? M=4-6, the readings from encoders 1-3 the encoder conversion factor to physical units = ??
%
Algorithm for identifying the peaks of the motion
m=4;
% Look at the first encoder
for n=1:N, if datmat(n,m) ~= 0, firstsign=sign(datmat(n,m)); ns=n; break;
-6-
end end peak=[]; neak=[]; numk=4;
% The variable to hold the peak values % The corresponding index of the peak value % Number of peaks to look for
for npk=1:numk, for n=ns+1:N, nsign=sign(datmat(n,m)); if nsign ~= firstsign, ns2=n; break; end end [ak,nk]=max(abs(datmat(ns:ns2,m))) peak=[peak,ak*firstsign]; neak=[neak,ns+nk-1]; ns=ns2; firstsign=nsign;
% ak is the peak value in the range ns:ns2, nk is its index
% Get ready for next peak search
if ns >= N-1, break; end; end plot(datmat(:,1),datmat(:,m)) hold on plot(neak-1,peak,'x')
-7-
Related Documents c2h70

Mechanical Vibration Lab Report 2ua61
November 2019 56
Mechanical Vibration Lab Manual 6t5e
January 2022 0
Lab Report Vibration 432u6w
December 2021 0
Mechanical Vibration 3k4x1n
December 2022 0
Mechanical Technology Lab Report 3n4s1o
December 2019 36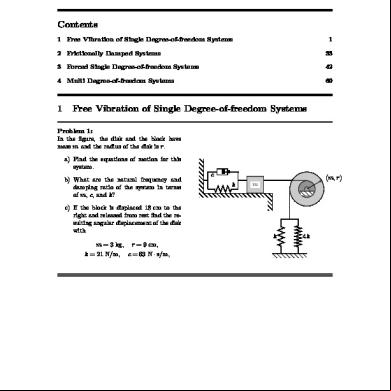
Mechanical Vibration Solved Examples 624m73
October 2019 171More Documents from "Chris Nicholls" c544f
Mechanical Vibration Lab Report 2ua61
November 2019 56
Chemistry Lab 2 - Flame Tests - Emission Spectroscopy 6z68
November 2019 32
Pai Rico O Guia De Investimentos 4r1j34
August 2020 0
6g3p1u
July 2021 0