Liaisons Tableau g3l70
This document was ed by and they confirmed that they have the permission to share it. If you are author or own the copyright of this book, please report to us by using this report form. Report 2z6p3t
Overview 5o1f4z
& View Liaisons Tableau as PDF for free.
More details 6z3438
- Words: 515
- Pages: 1
Torseurs des actions mécaniques transmissibles par des liaisons parfaites Les liaisons entre deux solides se définissent par la connaissance des caractéristiques générales suivantes : - la géométrie du (plan-plan, plan-cylindre, plan-sphère, cylindre-cylindre, etc.) - la fonction mécanique de la liaison, ou l'aptitude du à transmettre des efforts et à permettre des mouvements relatifs (degrés de liberté). Nom et schéma de la liaison Degrés de mobilité dans Torseur des actions mécaniques transmissibles par la liaison la liaison
Ponctuelle de normale z y y z x
y
x
z
Pivot d'axe y
y
y
z x
z
x
x
Pivot glissant d'axe x
y
y
y z
z
x
Glissière d'axe z y
x
y x
z
x
Linéaire annulaire d'axe y y z x x Linéaire rectiligne
x
y
z
x
Rotule y
z
x
z
z
x
x
Appui plan de normale x y x
z
x
x
Hélicoïdale d'axe z
z
{Τ1/2 }A
0 A 1/ 2 = = YA M A(1/2) A Z A
0 MA N A A
{Τ1/2 }A
X A A 1/ 2 = = YA M A(1/2) A 0
LA MA N A A
0
TZ
0
0
RX
TY
RY
0
RZ
TX
0
0
RY
TZ
RZ
{Τ1/2 }A
0
RX
0
RY
0
RZ
0
RX
TY
0
TZ
0
z x
z
x
0
0
0
0
TZ = f(R Z )
RZ
X A A 1/ 2 = = 0 0 A Z A
0 0 0 A
0 LA A 1/ 2 {Τ1/2 }A = = YA 0 MA(1/2) A 0 A 0 de ligne de z et de normale y
{Τ1/2 }A
{Τ1/2 }A
Translation Rotation y
y
{Τ1/2 }A
Translation Rotation
y
z
0
0 0 0 A LA 0 N A A
Translation Rotation
y
y
0
Translation Rotation
y
y
0
0 A 1/ 2 = = 0 0 A Z A
X A A 1/ 2 = = YA M A(1/2) A Z A
Translation Rotation
y
z
{Τ1/2 }A
Translation Rotation
y
z
Translation Rotation TX RX TY RY 0 RZ Translation Rotation 0 0 0 RY 0 0 Translation Rotation TX RX 0 0 0 0
{Τ1/2 }A
X A A 1/ 2 = = YA M A(1/2) A Z A
X A A 1/ 2 = = 0 M A(1/2) A 0
0 0 0 A 0 MA N A A
LA XA A 1/ 2 = MA = YA M A(1/2) A f(N A ) N A A
Ponctuelle de normale z y y z x
y
x
z
Pivot d'axe y
y
y
z x
z
x
x
Pivot glissant d'axe x
y
y
y z
z
x
Glissière d'axe z y
x
y x
z
x
Linéaire annulaire d'axe y y z x x Linéaire rectiligne
x
y
z
x
Rotule y
z
x
z
z
x
x
Appui plan de normale x y x
z
x
x
Hélicoïdale d'axe z
z
{Τ1/2 }A
0 A 1/ 2 = = YA M A(1/2) A Z A
0 MA N A A
{Τ1/2 }A
X A A 1/ 2 = = YA M A(1/2) A 0
LA MA N A A
0
TZ
0
0
RX
TY
RY
0
RZ
TX
0
0
RY
TZ
RZ
{Τ1/2 }A
0
RX
0
RY
0
RZ
0
RX
TY
0
TZ
0
z x
z
x
0
0
0
0
TZ = f(R Z )
RZ
X A A 1/ 2 = = 0 0 A Z A
0 0 0 A
0 LA A 1/ 2 {Τ1/2 }A = = YA 0 MA(1/2) A 0 A 0 de ligne de z et de normale y
{Τ1/2 }A
{Τ1/2 }A
Translation Rotation y
y
{Τ1/2 }A
Translation Rotation
y
z
0
0 0 0 A LA 0 N A A
Translation Rotation
y
y
0
Translation Rotation
y
y
0
0 A 1/ 2 = = 0 0 A Z A
X A A 1/ 2 = = YA M A(1/2) A Z A
Translation Rotation
y
z
{Τ1/2 }A
Translation Rotation
y
z
Translation Rotation TX RX TY RY 0 RZ Translation Rotation 0 0 0 RY 0 0 Translation Rotation TX RX 0 0 0 0
{Τ1/2 }A
X A A 1/ 2 = = YA M A(1/2) A Z A
X A A 1/ 2 = = 0 M A(1/2) A 0
0 0 0 A 0 MA N A A
LA XA A 1/ 2 = MA = YA M A(1/2) A f(N A ) N A A
Related Documents c2h70

Liaisons Tableau g3l70
April 2023 0
Dangerous Liaisons 3e5hu
November 2019 36
Liaisons Obligatoires Et Liaisons Interdites 1w1r
March 2023 0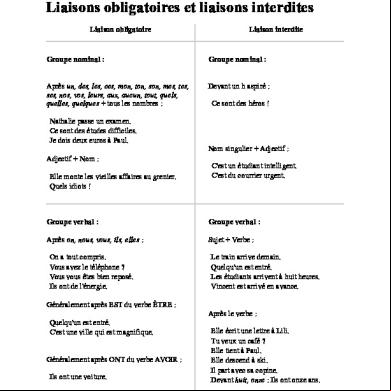
Liaisons Obligatoires Et Liaisons Interdites 1w1r
March 2023 0
Dangerous Liaisons 3e5hu
October 2021 0